

Question: Consider the RP planar manipulator shown below. Angle OAE is a right angle. The revolute joint rotates about origin O . The length of the
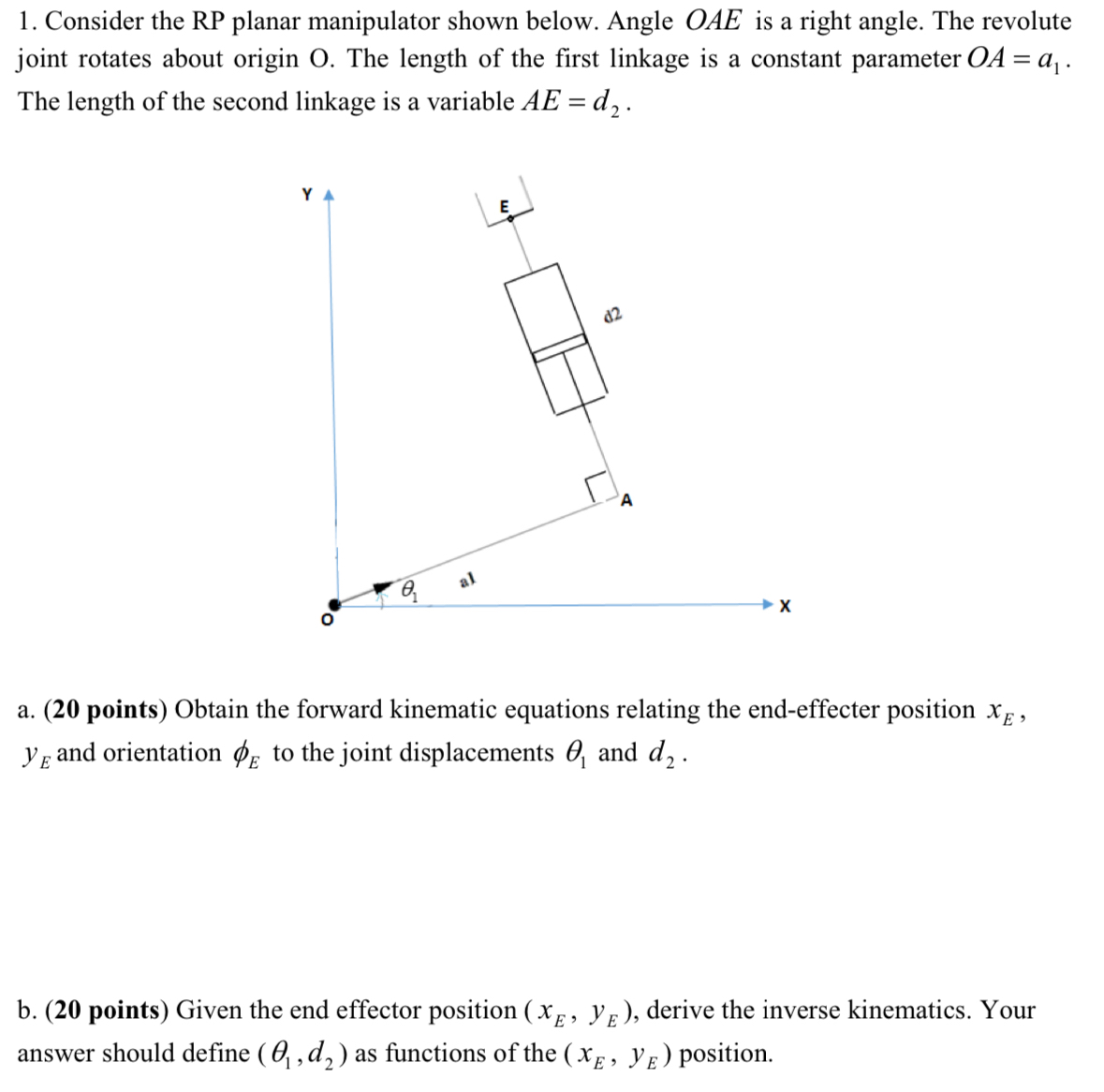
Consider the RP planar manipulator shown below. Angle OAE is a right angle. The revolute
joint rotates about origin O The length of the first linkage is a constant parameter
The length of the second linkage is a variable
a points Obtain the forward kinematic equations relating the endeffecter position
and orientation to the joint displacements and
b points Given the end effector position derive the inverse kinematics. Your
answer should define as functions of the position.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock