

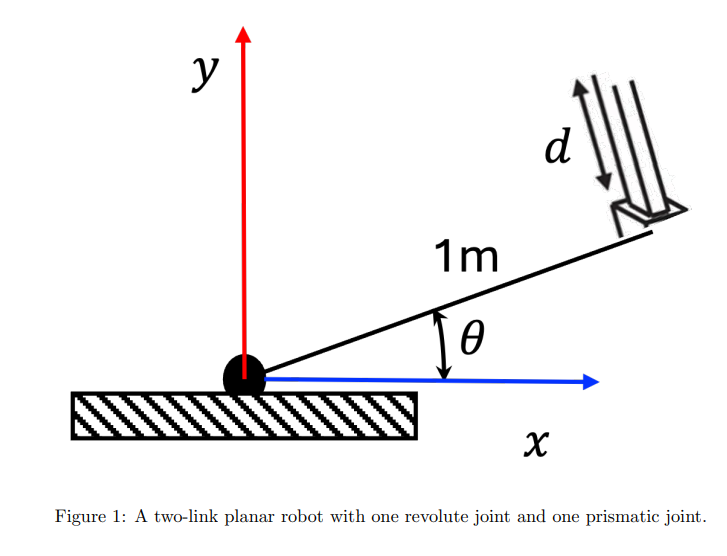
Question: Consider the two - link RP manipulator below. The first link length is 1 meter, and the second link is perpendicular to the first link.
Consider the twolink RP manipulator below. The first link length is meter, and the second link is perpendicular to the first link. The initial configuration of the system is given as q d where represents the rotation angle of the first joint and d is the displacement along the prismatic joint.
Please write the DH table for this robot and solve its forward kinematics. Your answer should be a position vector of the end effector, x x y
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock