

Question: could you please help me with my coding on matlab, whenever I run my program I keep getting the same values for theta1 and theta2
could you please help me with my coding on matlab, whenever I run my program I keep getting the same values for theta1 and theta2 (It doesnt change when I switch l1,l2, X, and Y parameter values).
subject: inverse kinematics
here's a link with more info: http://www.mathworks.com/help/fuzzy/examples/modeling-inverse-kinematics-in-a-robotic-arm.html
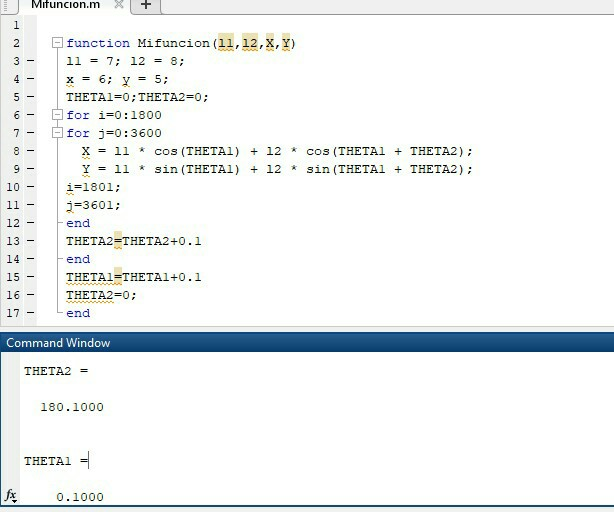
function Mi funcion (11, 12,X,Y) 11=7: 12 = 8; | THETA!=0 ; THETA2=0; for for i=0:1800 j=0: 3600 x = 11 cos (THETA!) + 12 cos (THETA! + THETA2) ; Y = 11sin (THETA!) + 12sin (THETA! + THETA2 ) ; i=1801; 10 =3601; 12- 13 - end THETA2 THETA2+0.1 end THETAl THETAl+0.1 THETA2-0 end 15 - 16 - Command Window THETA2 = 180.1000 THETAl 0.1000
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts