

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Derive the 3rd-order polynomial trajectories along the x and y directions for a planar holonomic mobile robot moving on the x-y plane and passing
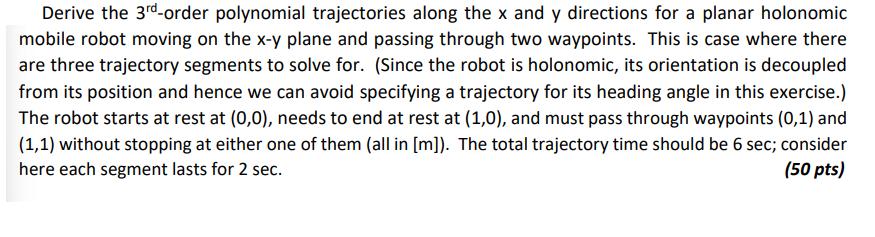
Derive the 3rd-order polynomial trajectories along the x and y directions for a planar holonomic mobile robot moving on the x-y plane and passing through two waypoints. This is case where there are three trajectory segments to solve for. (Since the robot is holonomic, its orientation is decoupled from its position and hence we can avoid specifying a trajectory for its heading angle in this exercise.) The robot starts at rest at (0,0), needs to end at rest at (1,0), and must pass through waypoints (0,1) and (1,1) without stopping at either one of them (all in [m]). The total trajectory time should be 6 sec; consider here each segment lasts for 2 sec. (50 pts)
Step by Step Solution
★★★★★
3.41 Rating (157 Votes )
There are 3 Steps involved in it
Step: 1
SOLUTION To derive the 3rdorder polynomial trajectories for a holonomic mobile robot we can use the following approach Step 1 Define the waypoints and time intervals Lets denote the initial waypoint a...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Classical Physics Optics Fluids Plasmas Elasticity Relativity And Statistical Physics
Authors: Kip S. Thorne, Roger D. Blandford
1st Edition
0691159025, 978-0691159027