

Question: Design a desired trajectory for a minimum acceleration for the 2nd order systems with the following requirements: Time(sec) 0 2 10 50 100 Position(m) 1
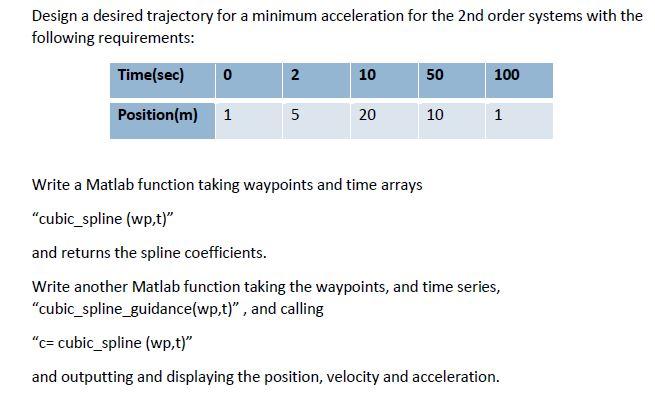
Design a desired trajectory for a minimum acceleration for the 2nd order systems with the following requirements: Time(sec) 0 2 10 50 100 Position(m) 1 5 20 10 1 Write a Matlab function taking waypoints and time arrays "cubic_spline (wp,t)" and returns the spline coefficients. Write another Matlab function taking the waypoints, and time series, "cubic_spline_guidance(wp,t)", and calling "C= cubic_spline (wp,t)" and outputting and displaying the position, velocity and acceleration. Design a desired trajectory for a minimum acceleration for the 2nd order systems with the following requirements: Time(sec) 0 2 10 50 100 Position(m) 1 5 20 10 1 Write a Matlab function taking waypoints and time arrays "cubic_spline (wp,t)" and returns the spline coefficients. Write another Matlab function taking the waypoints, and time series, "cubic_spline_guidance(wp,t)", and calling "C= cubic_spline (wp,t)" and outputting and displaying the position, velocity and acceleration
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts