

Question: Design a PLC control system to perform asynchronous control on a two - axis modular robot. Each axis ( AX - 1 or AX -
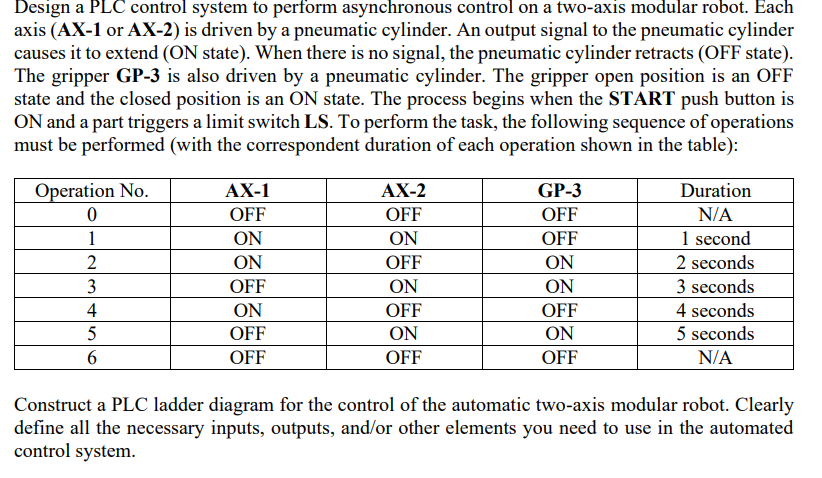
Design a PLC control system to perform asynchronous control on a twoaxis modular robot. Each axis AX or AX is driven by a pneumatic cylinder. An output signal to the pneumatic cylinder causes it to extend ON state When there is no signal, the pneumatic cylinder retracts OFF state The gripper GP is also driven by a pneumatic cylinder. The gripper open position is an OFF state and the closed position is an ON state. The process begins when the START push button is ON and a part triggers a limit switch LS To perform the task, the following sequence of operations must be performed with the correspondent duration of each operation shown in the table:
Design a PLC control system to perform asynchronous control on a twoaxis modular robot. Each
axis AX or AX is driven by a pneumatic cylinder. An output signal to the pneumatic cylinder
causes it to extend ON state When there is no signal, the pneumatic cylinder retracts OFF state
The gripper GP is also driven by a pneumatic cylinder. The gripper open position is an OFF
state and the closed position is an ON state. The process begins when the START push button is
ON and a part triggers a limit switch LS To perform the task, the following sequence of operations
must be performed with the correspondent duration of each operation shown in the table:
Construct a PLC ladder diagram for the control of the automatic twoaxis modular robot. Clearly
define all the necessary inputs, outputs, and
or other elements you need to use in the automated
control system.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock