

Question: Differential equation and linear algebra. 1. (Mass-spring with variable damping) The figure below depicts a typical mass-spring dashpot system where m denotes the mass of
Differential equation and linear algebra.
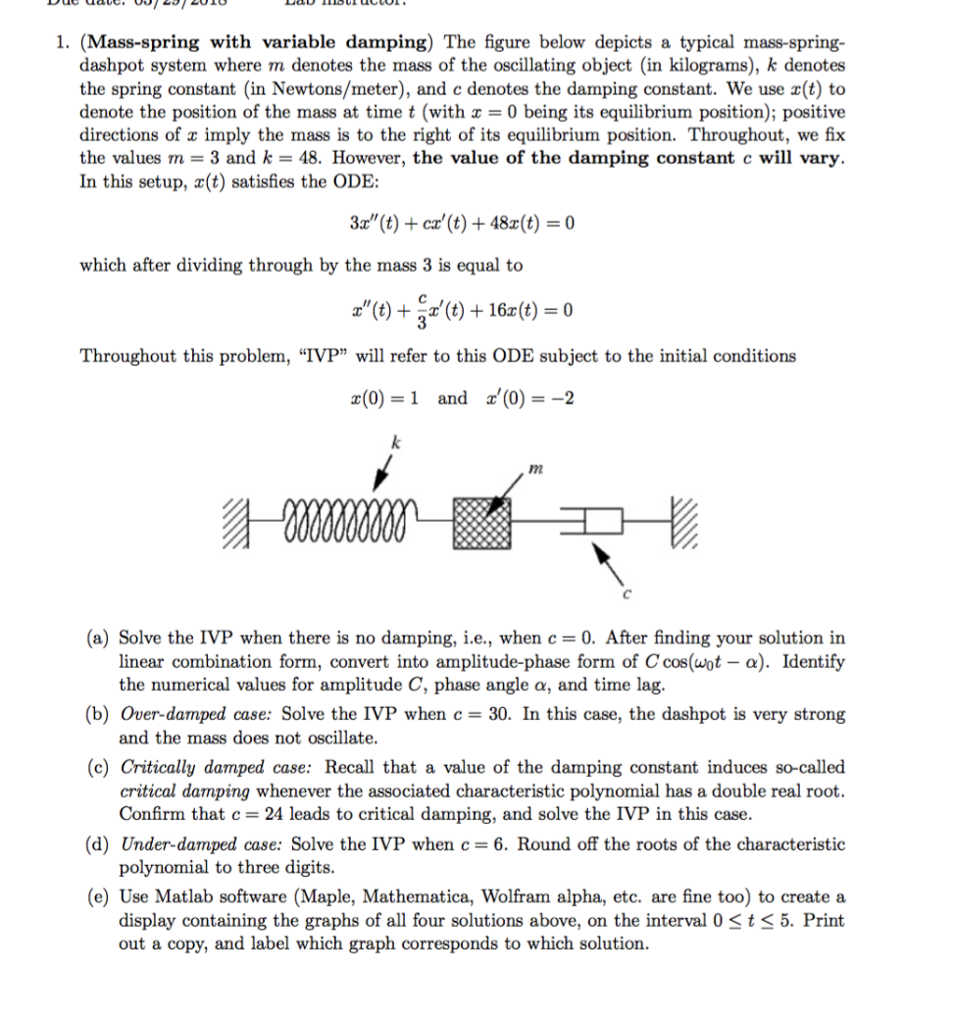
1. (Mass-spring with variable damping) The figure below depicts a typical mass-spring dashpot system where m denotes the mass of the oscillating object (in kilograms), k denotes the spring constant (in Newtons/meter), and c denotes the damping constant. We use (t) to denote the position of the mass at time t (with x 0 being its equilibrium position); positive directions of x imply the mass is to the right of its equilibrium position. Throughout, we fix the values m-3 and k = 48, However, the value of the damping constant c will vary. In this setup, x(t) satisfies the ODE: 3r"(t) cr'(t) +48x(t)0 which after dividing through by the mass 3 is equal to +16(t) 0 Throughout this problem, "IVP" will refer to this ODE subject to the initial conditions x(0)1 and (-2 (a) Solve the IVP when there s no damping, ie, when c-0. After finding your solution in linear combination form, convert into amplitude-phase form of C cos(wot - a). Identify the num erical values for amplitude C, phase angle ?, and time lag and the mass does not oscillate critical damping whenever the associated characteristic polynomial has a double real root (b) Over-damped case: Solve the IVP when c 30. In this case, the dashpot is very strong (c) Critically damped case: Recall that a value of the damping constant induces so-called Confirm that c 24 leads to critical damping, and solve the IVP in this case polynomial to three digits. display containing the graphs of all four solutions above, on the interval 0t
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts