

Question: Example function: function [x y] = cylindrical2cartesian(r,theta) %UNTITLED7 Summary of this function goes here % Detailed explanation goes here x = r.*cosd(theta); y = r.*sind(theta);
![Example function: function [x y] = cylindrical2cartesian(r,theta) %UNTITLED7 Summary of this](https://dsd5zvtm8ll6.cloudfront.net/si.experts.images/questions/2024/09/66f2d5cd1e46c_47666f2d5cc791aa.jpg)
Example function:
function [x y] = cylindrical2cartesian(r,theta) %UNTITLED7 Summary of this function goes here % Detailed explanation goes here x = r.*cosd(theta); y = r.*sind(theta); end
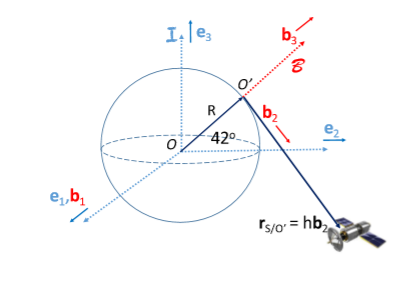
2: Satellite Tracking Consider two frames for tracking a satellite. Frame I is an inertial frame with origin O located at the center of the Earth with axis g aligned with the spin axis. Frame B is located with its origin, O', at a position on the surface of the Earth (R is the radius of the earth) at latitude A with b3 aligned with the vertical (zenith) and b2 is along the horizon. (a) Write a MATLAB function to convert coordinates in B to coordinates in I. The function should be of the form: [x2 x3] = coordinate_transform(a, h, R, X) where a is the altitude (along the b3 direction, h is the range (along the b2 direction), and A is the latitude of the observation point), where rn is the position coordinate along the n direction in the inertial frame, I, where for n = 1,2,3. I:le; b2 16 420 e,,b, Ts/o = hb, 2: Satellite Tracking Consider two frames for tracking a satellite. Frame I is an inertial frame with origin O located at the center of the Earth with axis g aligned with the spin axis. Frame B is located with its origin, O', at a position on the surface of the Earth (R is the radius of the earth) at latitude A with b3 aligned with the vertical (zenith) and b2 is along the horizon. (a) Write a MATLAB function to convert coordinates in B to coordinates in I. The function should be of the form: [x2 x3] = coordinate_transform(a, h, R, X) where a is the altitude (along the b3 direction, h is the range (along the b2 direction), and A is the latitude of the observation point), where rn is the position coordinate along the n direction in the inertial frame, I, where for n = 1,2,3. I:le; b2 16 420 e,,b, Ts/o = hb
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts