

Question: Figure 2 shows a three - axis manipulator with three revolute joints. Note that 1 , 2 , and 3 are variables, while l 1
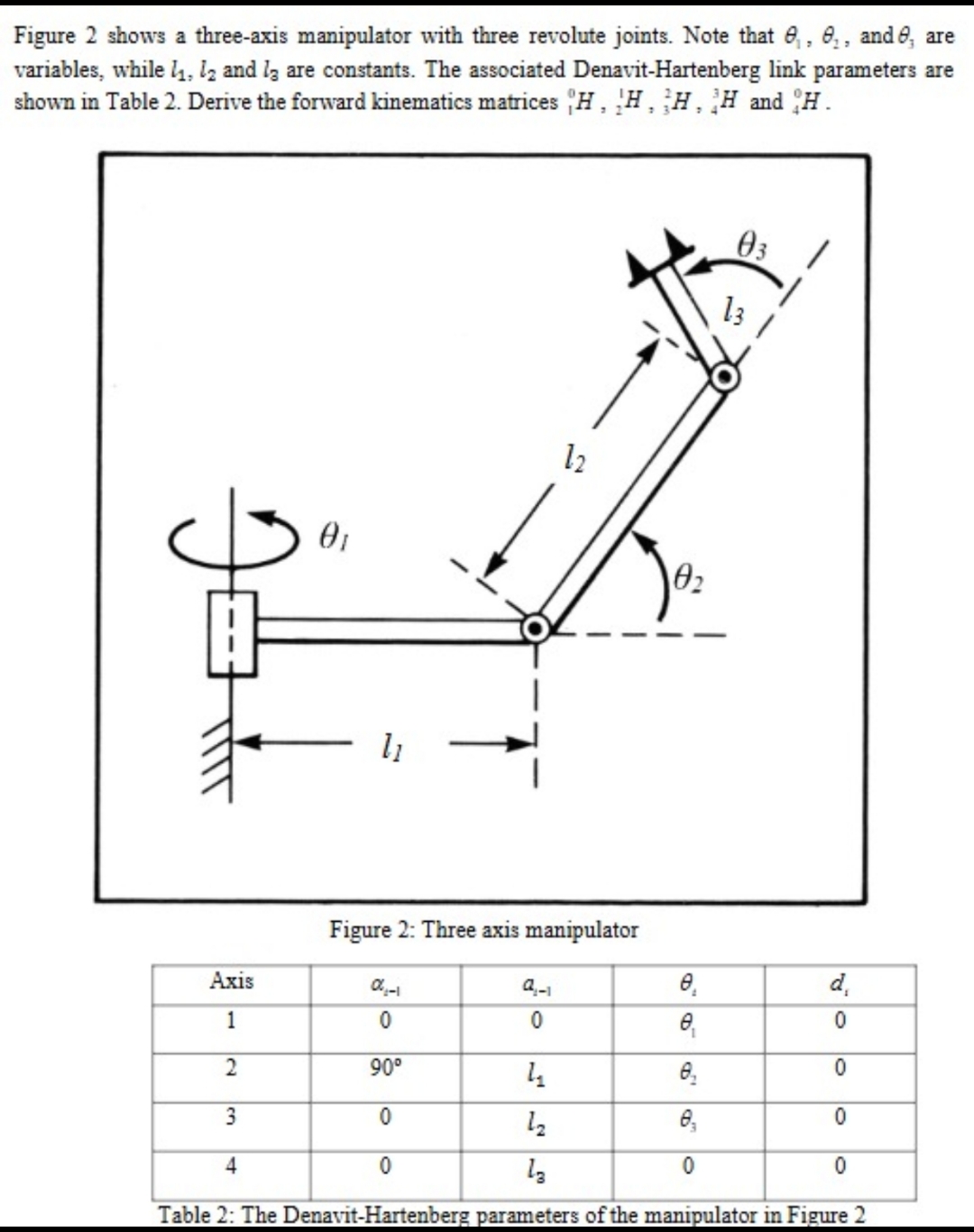
Figure shows a threeaxis manipulator with three revolute joints. Note that and are variables, while and are constants. The associated DenavitHartenberg link parameters are shown in Table Derive the forward kinematics matrices and
Figure : Three axis manipulator
tableAxis
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock