

Question: FIGURE 3 . 2 0 : Schematic of a 3 R wrist in which all three axes intersect at a point and are mutually orthogonal.
FIGURE : Schematic of a wrist in which all three axes intersect at a point and
are mutually orthogonal. This design is used in the PUMA manipulator and many
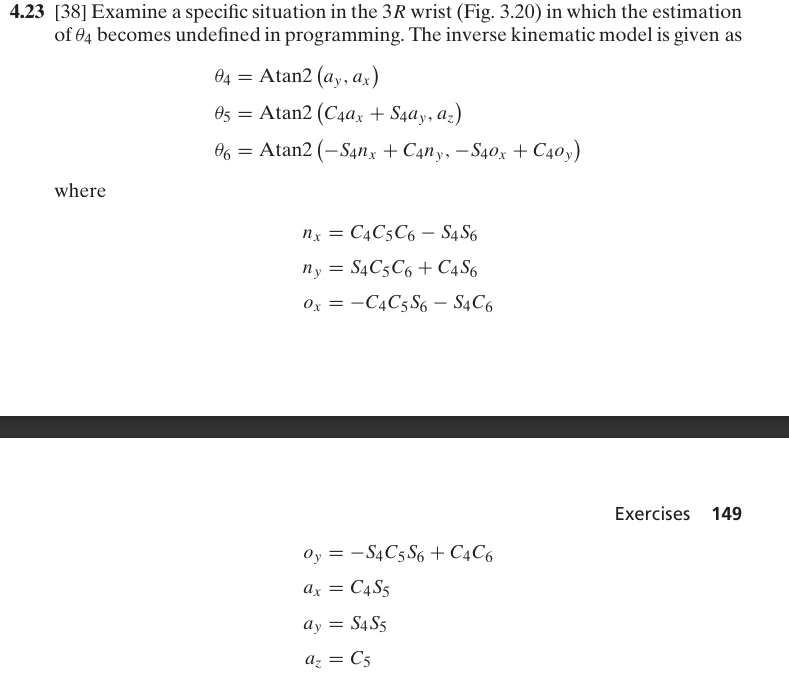
other industrial robots Examine a specific situation in the wrist Fig in which the estimation
of becomes undefined in programming. The inverse kinematic model is given as
Atan
Atan
Atan
where
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock