

Question: Figure 6 . 5 . 1 Two - fingered hand manipulating a grasped object Department of Mechanical Engineering Massachusetts Institute of Technology Introduction to Robotics,
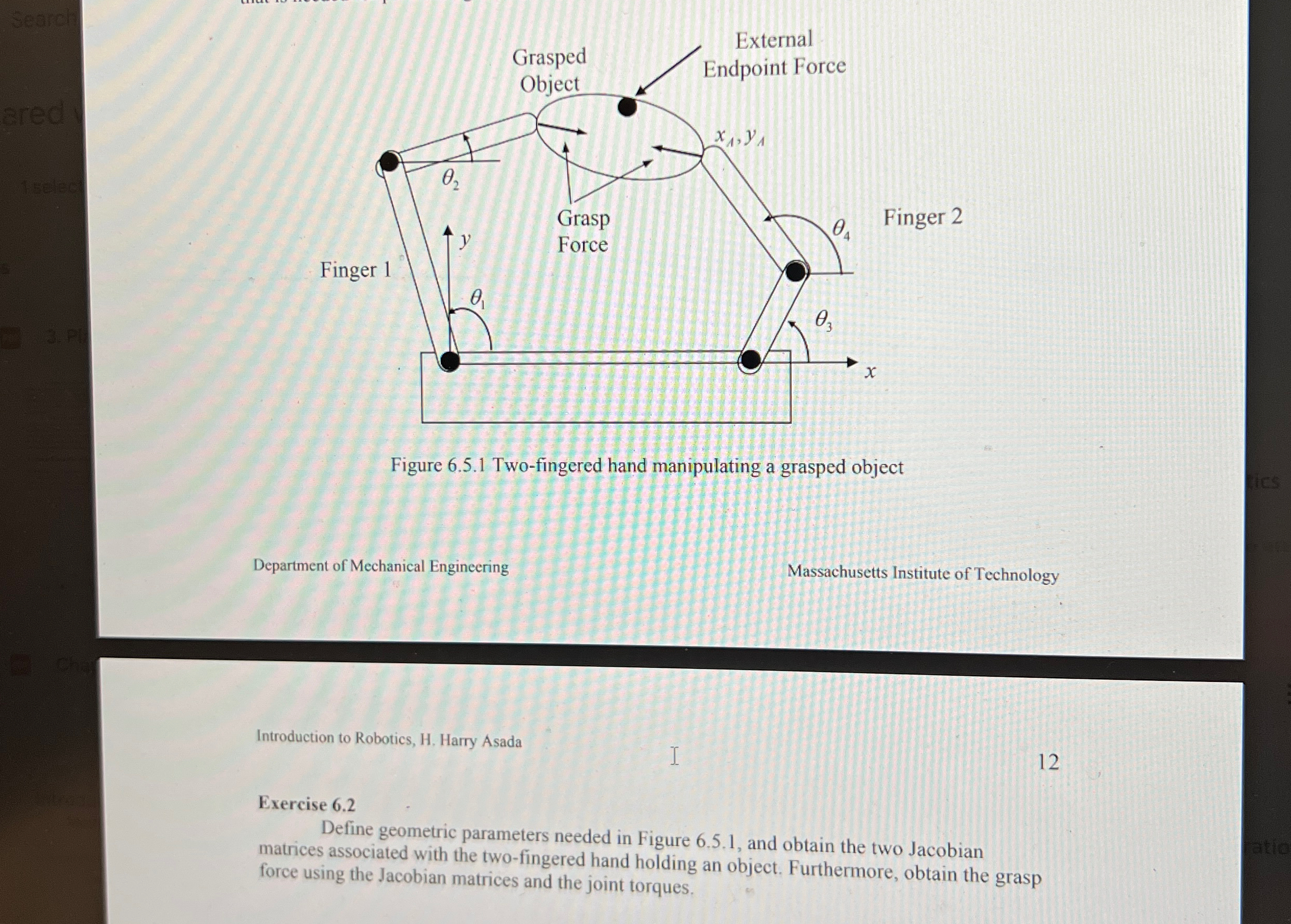
Figure Twofingered hand manipulating a grasped object
Department of Mechanical Engineering
Massachusetts Institute of Technology
Introduction to Robotics, H Harry Asada
Exercise
Define geometric parameters needed in Figure and obtain the two Jacobian matrices associated with the twofingered hand holding an object. Furthermore, obtain the grasp force using the Jacobian matrices and the joint torques.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock