

Question: For parameters that will be used in this project, you must choose your own height H[m] and weight M[kg] values. Question 3 Consider matrices
For parameters that will be used in this project, you must choose your own height
H[m]\ and weight
M[kg]values.\ Question 3\ Consider matrices
{A,B,C,D}corresponding to the linear system, after the parameters\ are set.\ Is the system controllable? Is it observable?\ 2 . Is the system stable?\ From now on, suppose that the system can be controlled by the input
u=\\\\tau _(1)only\ is forced).\ Find the appropriate matrices
{A,B,C,D}.\ Find transfer functions
(\\\\theta _(1)(s))/(u(s)),(\\\\theta _(2)(s))/(u(s))of the system.\ Is the system still controllable?\ Is there any input
usuch that the system stabilizes on the values
\\\\theta _(1)=\\\\theta _(2)=0.1?\ How does your answer align with the system's controllability?\ Question 4\ Implement and present the linear and nonlinear model of the system in an open loop in\
([x_(1)],[x]),([\\\\theta _(1)],[\\\\theta ^()]),(0.1) 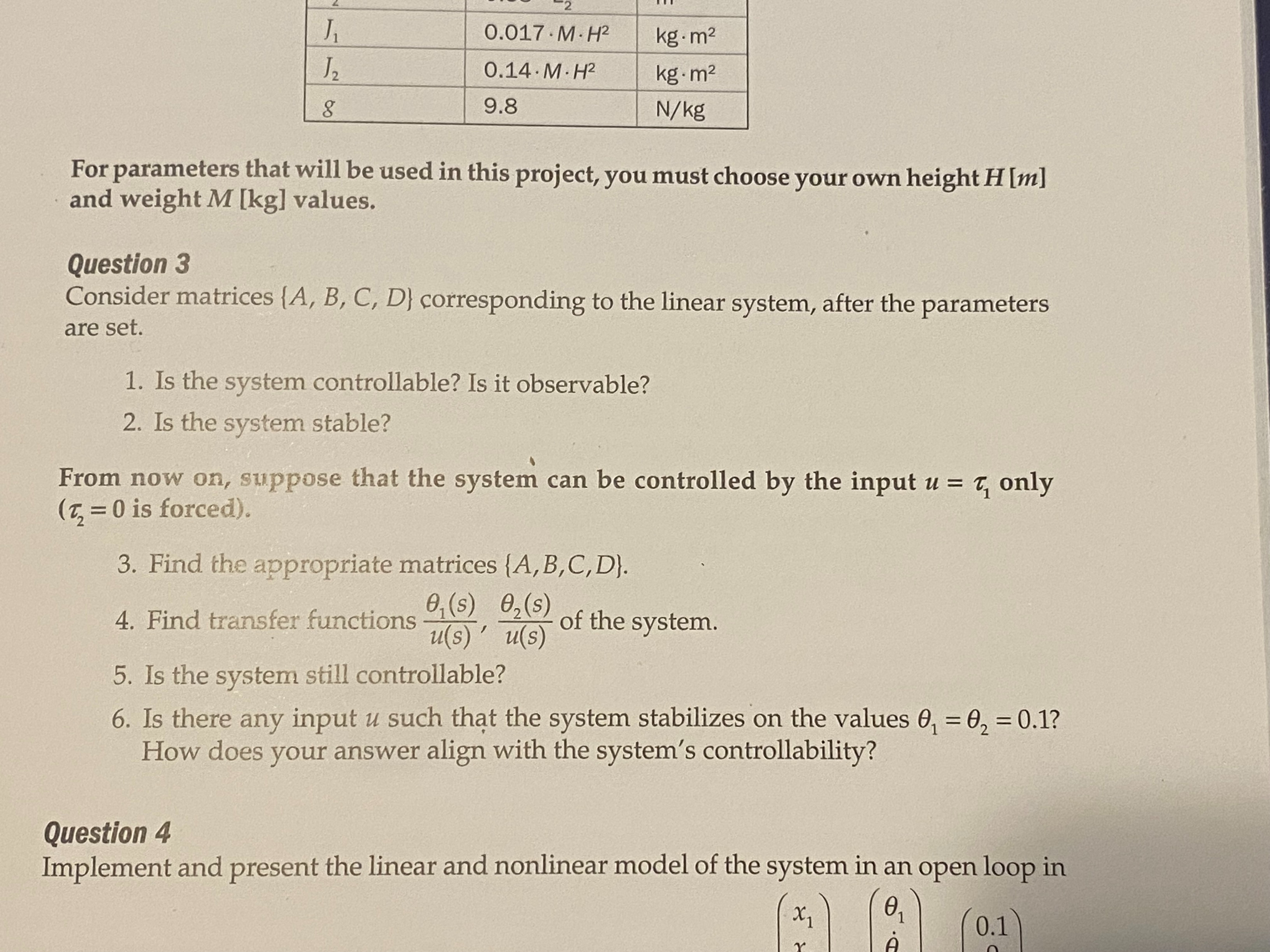
For parameters that will be used in this project, you must choose your own height H[m] and weight M[kg] values. Question 3 Consider matrices {A,B,C,D} corresponding to the linear system, after the parameters are set. 1. Is the system controllable? Is it observable? 2. Is the system stable? From now on, suppose that the system can be controlled by the input u=1 only (2=0 is forced). 3. Find the appropriate matrices {A,B,C,D}. 4. Find transfer functions u(s)1(s),u(s)2(s) of the system. 5. Is the system still controllable? 6. Is there any input u such that the system stabilizes on the values 1=2=0.1 ? How does your answer align with the system's controllability? Question 4 Implement and present the linear and nonlinear model of the system in an open loop in (x1x)(1A)(0.1) For parameters that will be used in this project, you must choose your own height H[m] and weight M[kg] values. Question 3 Consider matrices {A,B,C,D} corresponding to the linear system, after the parameters are set. 1. Is the system controllable? Is it observable? 2. Is the system stable? From now on, suppose that the system can be controlled by the input u=1 only (2=0 is forced). 3. Find the appropriate matrices {A,B,C,D}. 4. Find transfer functions u(s)1(s),u(s)2(s) of the system. 5. Is the system still controllable? 6. Is there any input u such that the system stabilizes on the values 1=2=0.1 ? How does your answer align with the system's controllability? Question 4 Implement and present the linear and nonlinear model of the system in an open loop in (x1x)(1A)(0.1)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts