

Question: Consider the top view of a robotic workstation, with the parts A and B as shown on the worktable with the reference points of
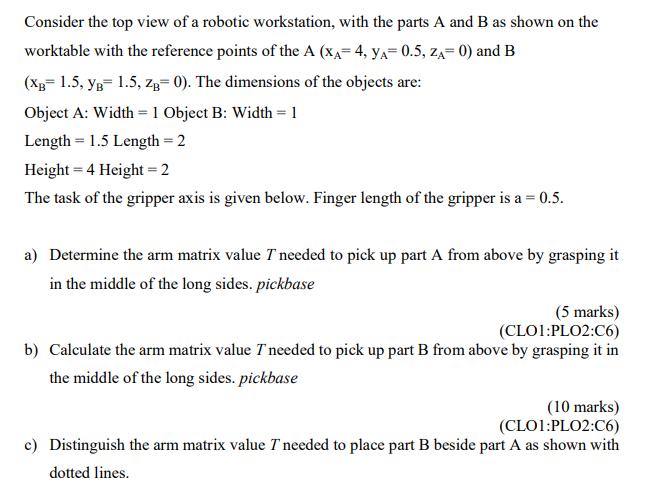
Consider the top view of a robotic workstation, with the parts A and B as shown on the worktable with the reference points of the A (XA-4, YA=0.5, ZA= 0) and B (XB-1.5, YB= 1.5, ZB= 0). The dimensions of the objects are: Object A: Width = 1 Object B: Width = 1 Length = 1.5 Length = 2 Height = 4 Height = 2 The task of the gripper axis is given below. Finger length of the gripper is a = 0.5. a) Determine the arm matrix value I needed to pick up part A from above by grasping it in the middle of the long sides. pickbase (5 marks) (CLO1:PLO2:C6) b) Calculate the arm matrix value I needed to pick up part B from above by grasping it in the middle of the long sides. pickbase (10 marks) (CLO1:PLO2:C6) c) Distinguish the arm matrix value I needed to place part B beside part A as shown with dotted lines.
Step by Step Solution
3.41 Rating (154 Votes )
There are 3 Steps involved in it
To determine the arm matrix values needed for the given tasks well need to calculate the desired positions and orientations of the gripper for each sc... View full answer

Get step-by-step solutions from verified subject matter experts