

Question: Formulate the mobile robot trajectory following problem as a control problem. A mobile robot position at time t is denoted as ( x ( t
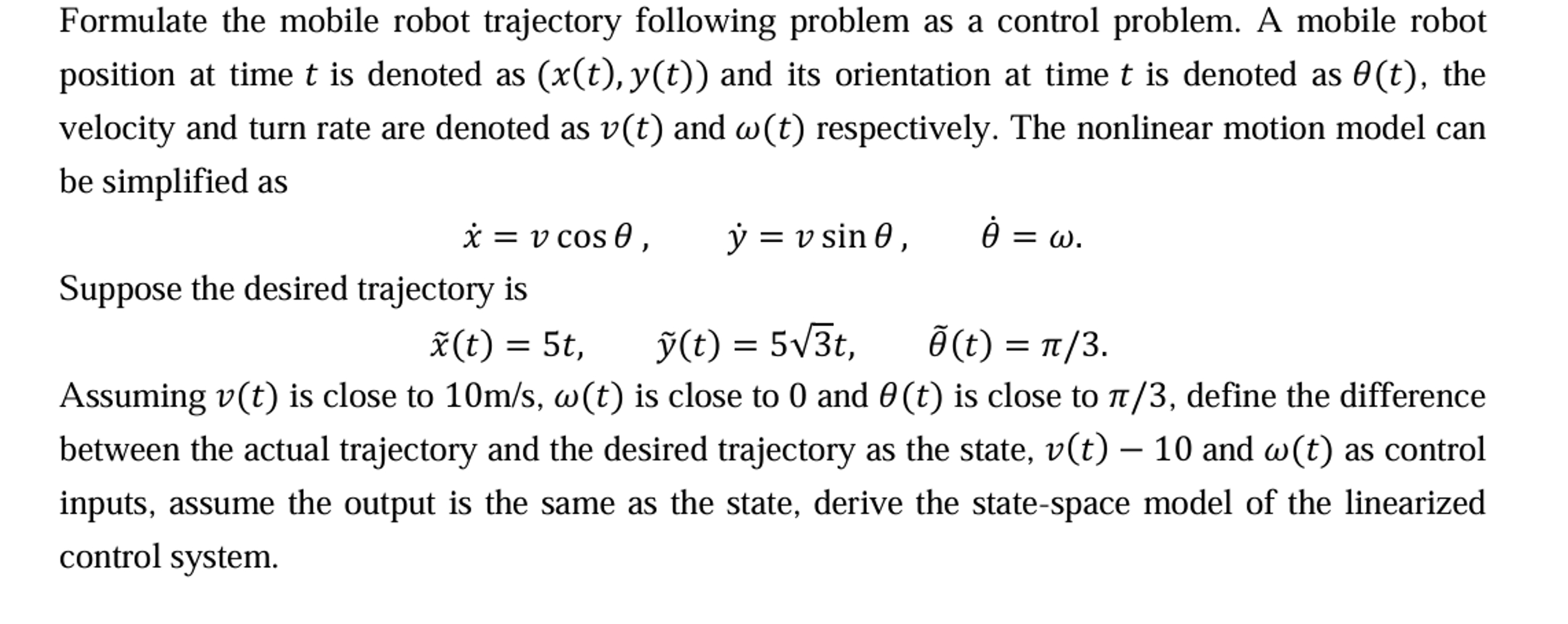
Formulate the mobile robot trajectory following problem as a control problem. A mobile robot
position at time is denoted as and its orientation at time is denoted as the
velocity and turn rate are denoted as and respectively. The nonlinear motion model can
be simplified as
vcosvsin
Suppose the desired trajectory is
tildetildetilde
Assuming is close to is close to and is close to define the difference
between the actual trajectory and the desired trajectory as the state, and as control
inputs, assume the output is the same as the state, derive the statespace model of the linearized
control system.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock