

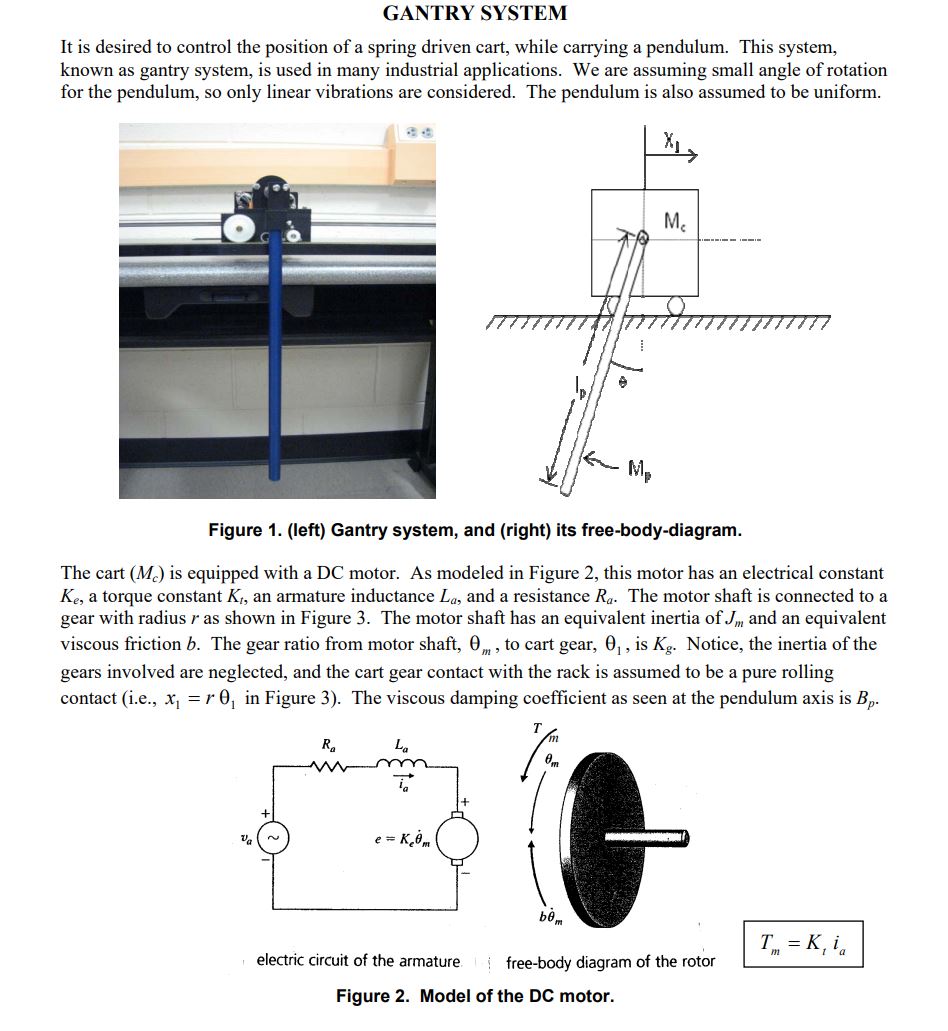
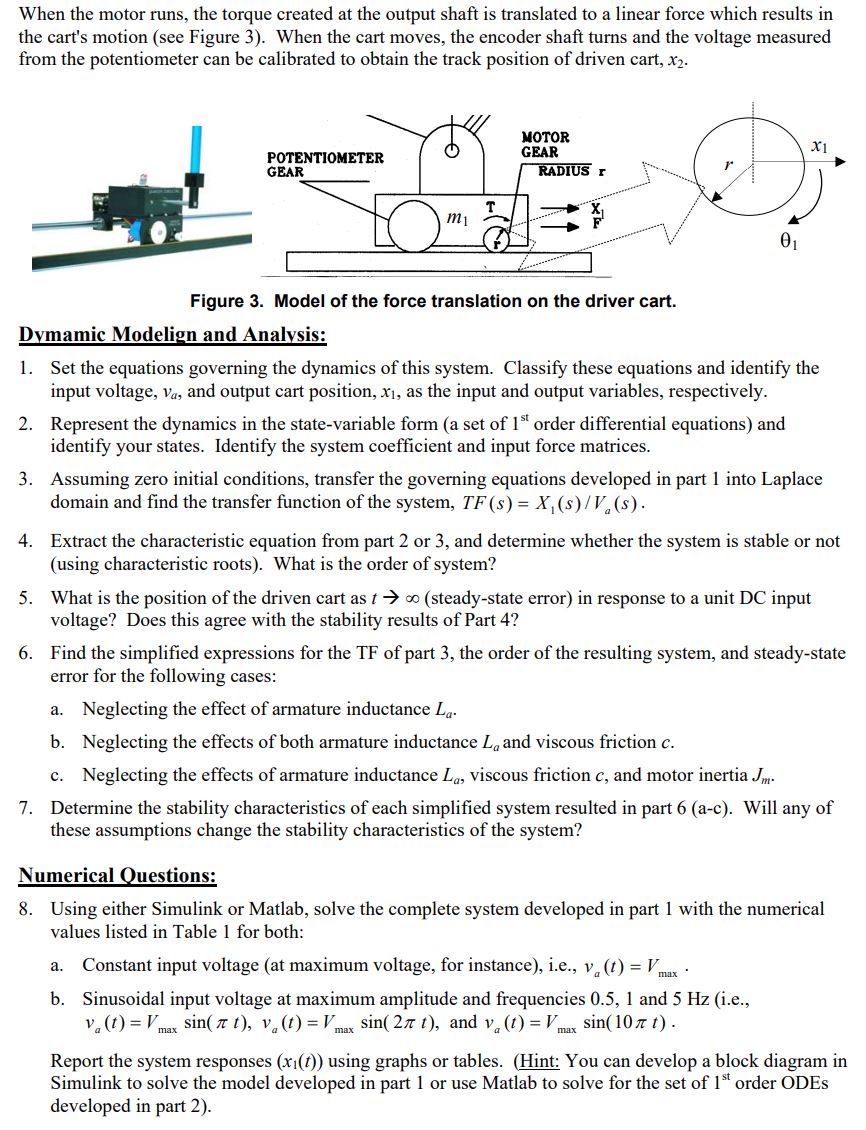
GANTRY SYSTEM It is desired to control the position of a spring driven cart, while carrying...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:

Related Book For 
Posted Date:
