

Question: General Camera Model ( 3 D World Points to 2 D Image Points ) : Given the following camera parameters: Intrinsic matrix K : K
General Camera Model D World Points to D Image Points: Given the following camera
parameters:
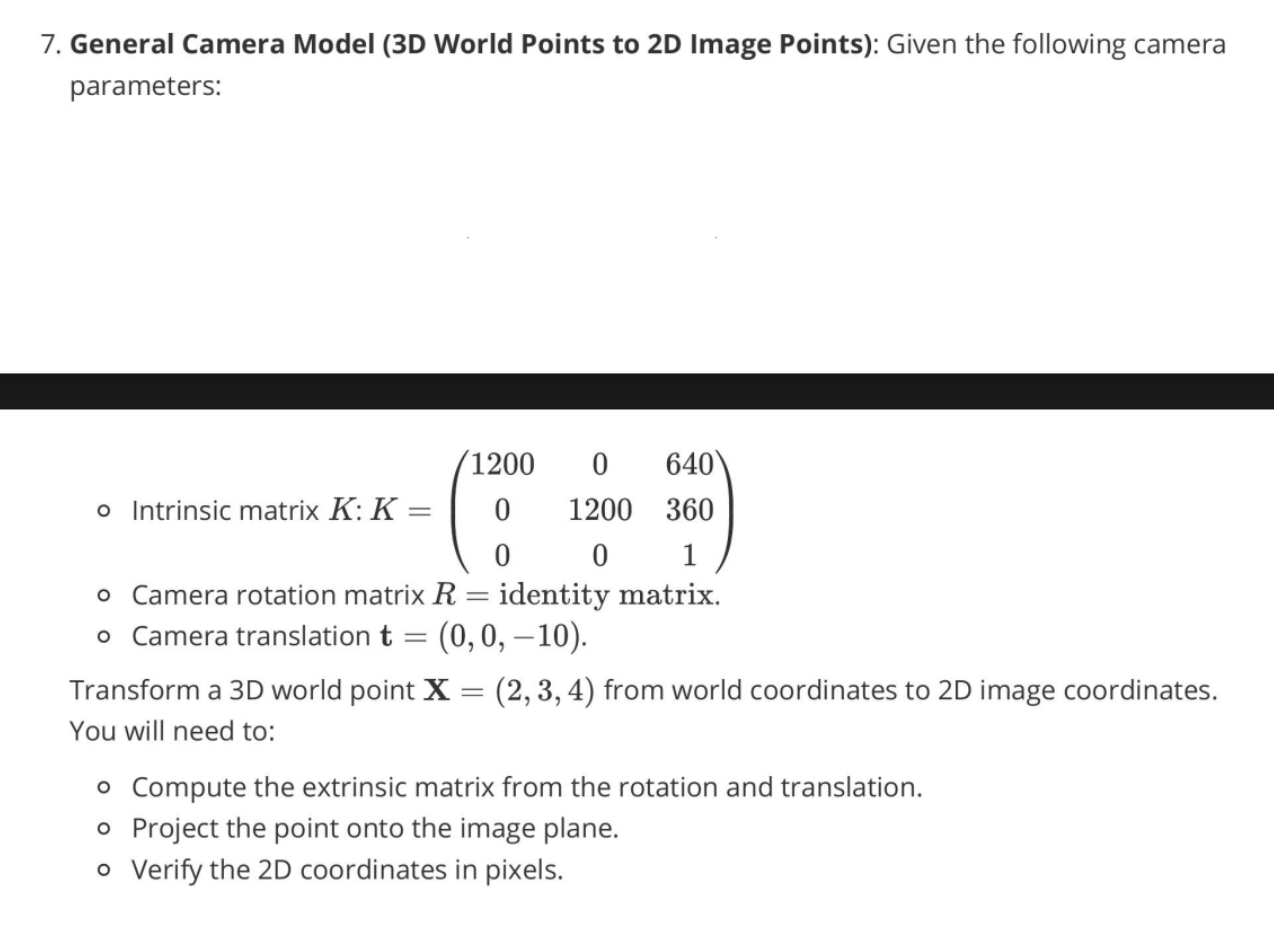
Intrinsic matrix :
Camera rotation matrix identity matrix.
Camera translation
Transform a D world point from world coordinates to D image coordinates.
You will need to:
Compute the extrinsic matrix from the rotation and translation.
Project the point onto the image plane.
Verify the D coordinates in pixels.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock