

Question: Computer Vision Image Formation and Camera Hi, I'm stuck on this problem for a computer vision course. What are the steps I need to take
Computer Vision Image Formation and Camera
Hi, I'm stuck on this problem for a computer vision course. What are the steps I need to take to solve this?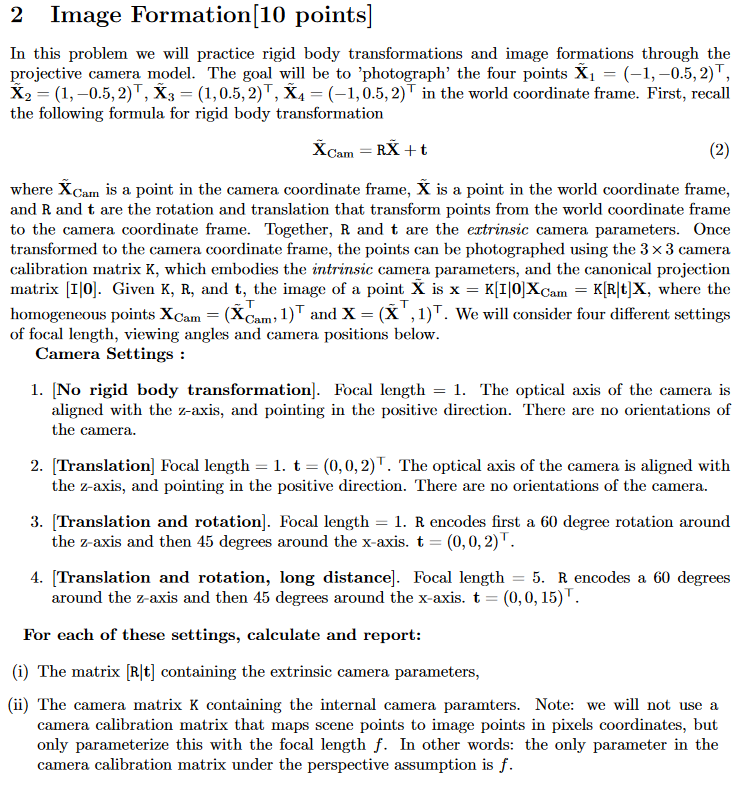
In this problem we will practice rigid body transformations and image formations through the projective camera model. The goal will be to 'photograph' the four points X_1 = (-1, -0.5, 2)^T, X_2 = (1, -0.5, 2)^T, X_3 = (1, 0.5, 2)^T, X_4 = (-1, 0.5, 2)^T in the world coordinate frame. First, recall the following formula for rigid body transformation X_Cam = RX + t where X_Cam is a point in the camera coordinate frame, X is a point in the world coordinate frame, and R and t are the rotation and translation that transform points from the world coordinate frame to the camera coordinate frame. Together, R and t are the extrinsic camera parameters. Once transformed to the camera coordinate frame, the points can be photographed using the 3 times 3 camera calibration matrix K, which embodies the intrinsic camera parameters, and the canonical projection matrix [I|0]. Given K, R, and t, the image of a point X is x = Cam K[I|0]X_Cam = K[R|t]X, where the homogeneous points X_Cam = (X^T_Cam, 1)^T and X = (X^T, 1)^T. We will consider four different settings Cam of focal length, viewing angles and camera positions below. Camera Settings: 1. [No rigid body transformation]. Focal length = 1. The optical axis of the camera is aligned with the z-axis, and pointing in the positive direction. There are no orientations of the camera. 2. [Translation] Focal length = 1.. t = (0, 0, 2)^T. The optical axis of the camera is aligned with the z-axis, and pointing in the positive direction. There are no orientations of the camera. 3. [Translation and rotation]. Focal length = 1. R encodes first a 60 degree rotation around the z-axis and then 45 degrees around the x-axis. T = (0, 0, 2)^T. 4. [Translation and rotation, long distance]. Focal length = 5. R encodes a 60 degrees around the z-axis and then 45 degrees around the x-axis. t = (0, 0, 15)^T. For each of these settings, calculate and report: (i) The matrix [R|t] containing the extrinsic camera parameters, (ii) The camera matrix K containing the internal camera parameters. In this problem we will practice rigid body transformations and image formations through the projective camera model. The goal will be to 'photograph' the four points X_1 = (-1, -0.5, 2)^T, X_2 = (1, -0.5, 2)^T, X_3 = (1, 0.5, 2)^T, X_4 = (-1, 0.5, 2)^T in the world coordinate frame. First, recall the following formula for rigid body transformation X_Cam = RX + t where X_Cam is a point in the camera coordinate frame, X is a point in the world coordinate frame, and R and t are the rotation and translation that transform points from the world coordinate frame to the camera coordinate frame. Together, R and t are the extrinsic camera parameters. Once transformed to the camera coordinate frame, the points can be photographed using the 3 times 3 camera calibration matrix K, which embodies the intrinsic camera parameters, and the canonical projection matrix [I|0]. Given K, R, and t, the image of a point X is x = Cam K[I|0]X_Cam = K[R|t]X, where the homogeneous points X_Cam = (X^T_Cam, 1)^T and X = (X^T, 1)^T. We will consider four different settings Cam of focal length, viewing angles and camera positions below. Camera Settings: 1. [No rigid body transformation]. Focal length = 1. The optical axis of the camera is aligned with the z-axis, and pointing in the positive direction. There are no orientations of the camera. 2. [Translation] Focal length = 1.. t = (0, 0, 2)^T. The optical axis of the camera is aligned with the z-axis, and pointing in the positive direction. There are no orientations of the camera. 3. [Translation and rotation]. Focal length = 1. R encodes first a 60 degree rotation around the z-axis and then 45 degrees around the x-axis. T = (0, 0, 2)^T. 4. [Translation and rotation, long distance]. Focal length = 5. R encodes a 60 degrees around the z-axis and then 45 degrees around the x-axis. t = (0, 0, 15)^T. For each of these settings, calculate and report: (i) The matrix [R|t] containing the extrinsic camera parameters, (ii) The camera matrix K containing the internal camera parameters
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts