

Question: Given the following plant and feedback element blocks, connected in a standard, negative feedback loop configuration, design a controller that will cause the system
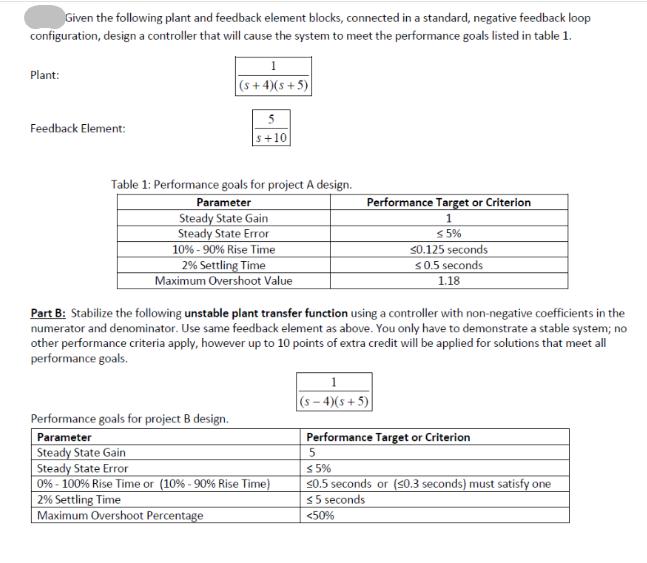
Given the following plant and feedback element blocks, connected in a standard, negative feedback loop configuration, design a controller that will cause the system to meet the performance goals listed in table 1. Plant: Feedback Element: 1 (s+4)(s+5) Table 1: Performance goals for project A design. Parameter Steady State Gain Steady State Error 10%-90% Rise Time 2% Settling Time Maximum Overshoot Value Performance goals for project B design. Parameter 5 s+10 Steady State Gain Steady State Error Part B: Stabilize the following unstable plant transfer function using a controller with non-negative coefficients in the numerator and denominator. Use same feedback element as above. You only have to demonstrate a stable system; no other performance criteria apply, however up to 10 points of extra credit will be applied for solutions that meet all performance goals. Performance Target or Criterion 1 < 5% 0% - 100% Rise Time or (10%-90% Rise Time) 2% Settling Time Maximum Overshoot Percentage 30.125 seconds 0.5 seconds 1.18 1 (s-4)(s+5) Performance Target or Criterion 5 $ 5% 0.5 seconds or (0.3 seconds) must satisfy one
Step by Step Solution
There are 3 Steps involved in it
Part A MatLab Code s tfs G... View full answer

Get step-by-step solutions from verified subject matter experts