

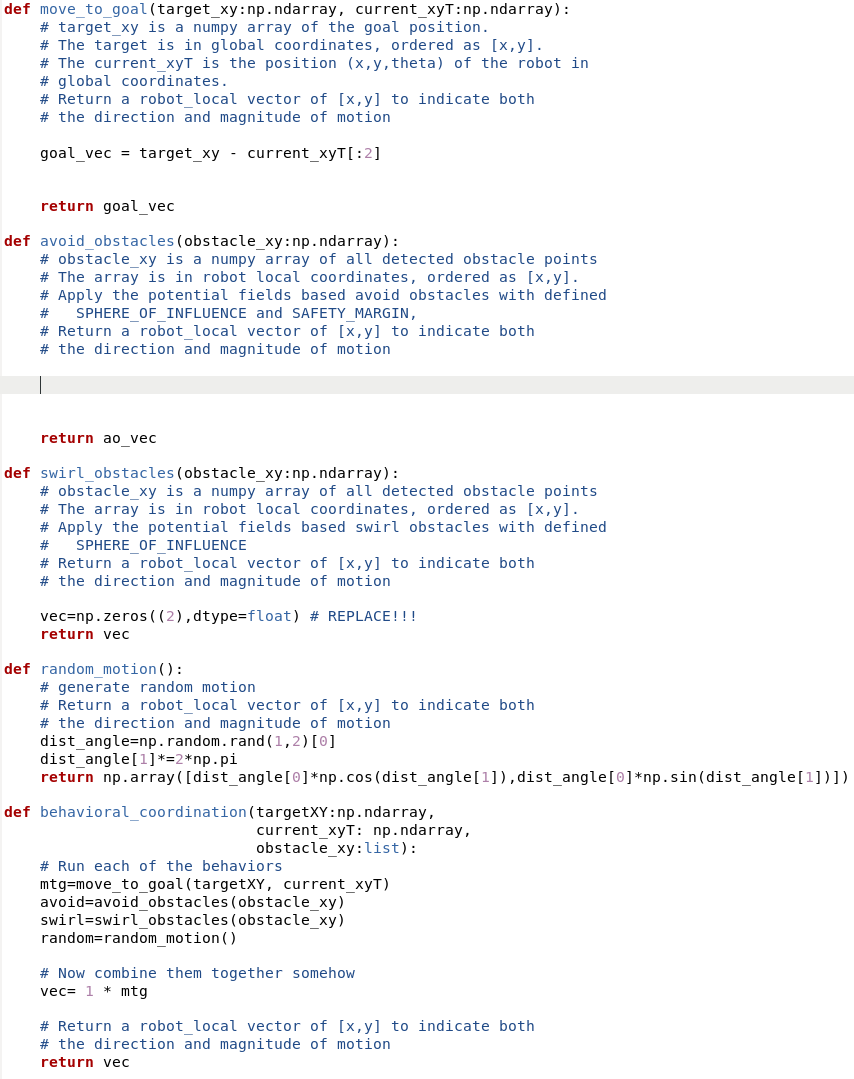
Question: Given the following python ROS code, how would you implement the move to goal and other functions to get the robot to correctly move? Uses
Given the following python ROS code, how would you implement the move to goal and other functions to get the robot to correctly move? Uses numpy arrays and should return vectors.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock