

Question: Hello, how can u help me to do this assignment, please? the deadline on 31-May Assignment: Real Time Operating System Part A. Scheduling algorithms Common
Hello, how can u help me to do this assignment, please? the deadline on 31-May
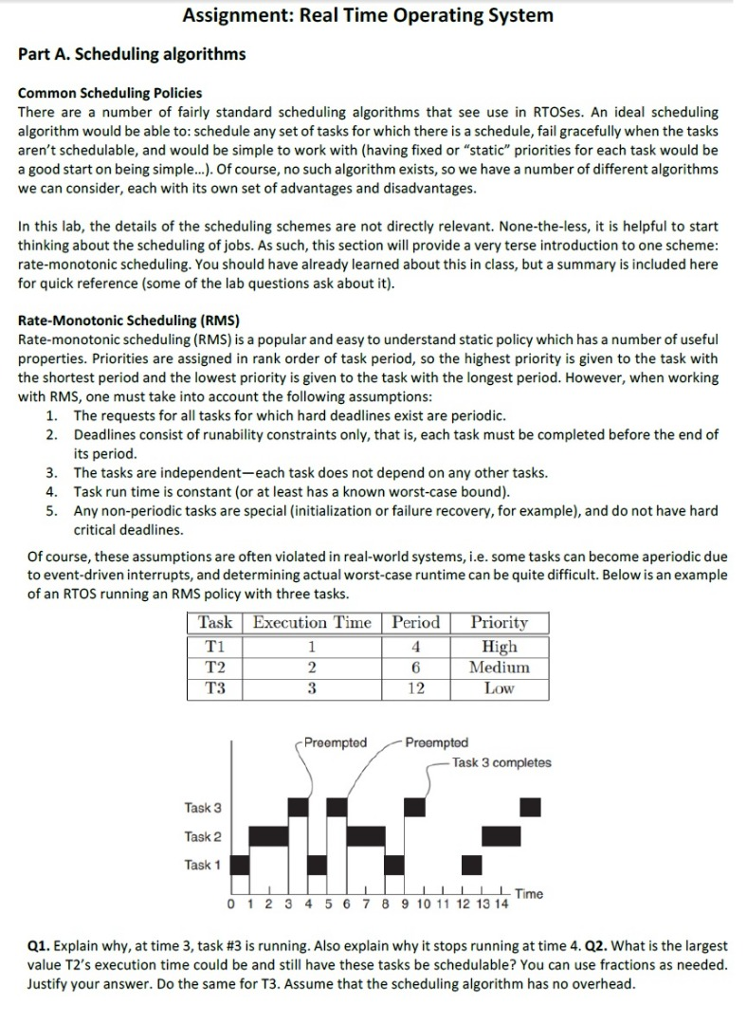
Assignment: Real Time Operating System Part A. Scheduling algorithms Common Scheduling Policies There are a number of fairly standard scheduling algorithms that see use in RTOSes. An ideal scheduling algorithm would be able to: schedule any set of tasks for which there is a schedule, fail gracefully when the tasks aren't schedulable, and would be simple to work with (having fixed or "static" priorities for each task would be a good start on being simple...). Of course, no such algorithm exists, so we have a number of different algorithms we can consider, each with its own set of advantages and disadvantages. In this lab, the details of the scheduling schemes are not directly relevant. None-the-less, it is helpful to start thinking about the scheduling of jobs. As such, this section will provide a very terse introduction to one scheme rate-monotonic scheduling. You should have already learned about this in class, but a summary is included here for quick reference (some of the lab questions ask about it) Rate-Monotonic Scheduling (RMS) Rate-monotonic scheduling (RMS) is a popular and easy to understand static policy which has a number of useful properties. Priorities are assigned in rank order of task period, so the highest priority is given to the task with the shortest period and the lowest priority is given to the task with the longest period. However, when working with RMS, one must take into account the following assumptions The requests for all tasks for which hard deadlines exist are periodic. Deadlines consist of runability constraints only, that is, each task must be completed before the end of its period The tasks are independent-each task does not depend on any other tasks. Task run time is constant (or at least has a known worst-case bound) Any non-periodic tasks are special (initialization or failure recovery, for example), and do not have hard critical deadlines. 1. 2. 3. 4. 5. Of course, these assumptions are often violated in real-world systems, i.e. some tasks can become aperiodic due to event-driven interrupts, and determining actual worst-case runtime can be quite difficult. Below is an example of an RTOS running an RMS policy with three tasks. Task Execution Time Perio Priority T1 T2 T3 High 2 6 Medium Proompted Proomptod Task 3 completes Task 3 Task 2 Task 1 Time 0 1 2 3 4 5 6 7 8 910 11 12 13 14 Q1. Explain why, at time 3, task #3 is running. Also explain why it stops running at time 4, Q2, what is the largest value T2's execution time could be and still have these tasks be schedulable? You can use fractions as needed Justify your answer. Do the same for T3. Assume that the scheduling algorithm has no overhead
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts