

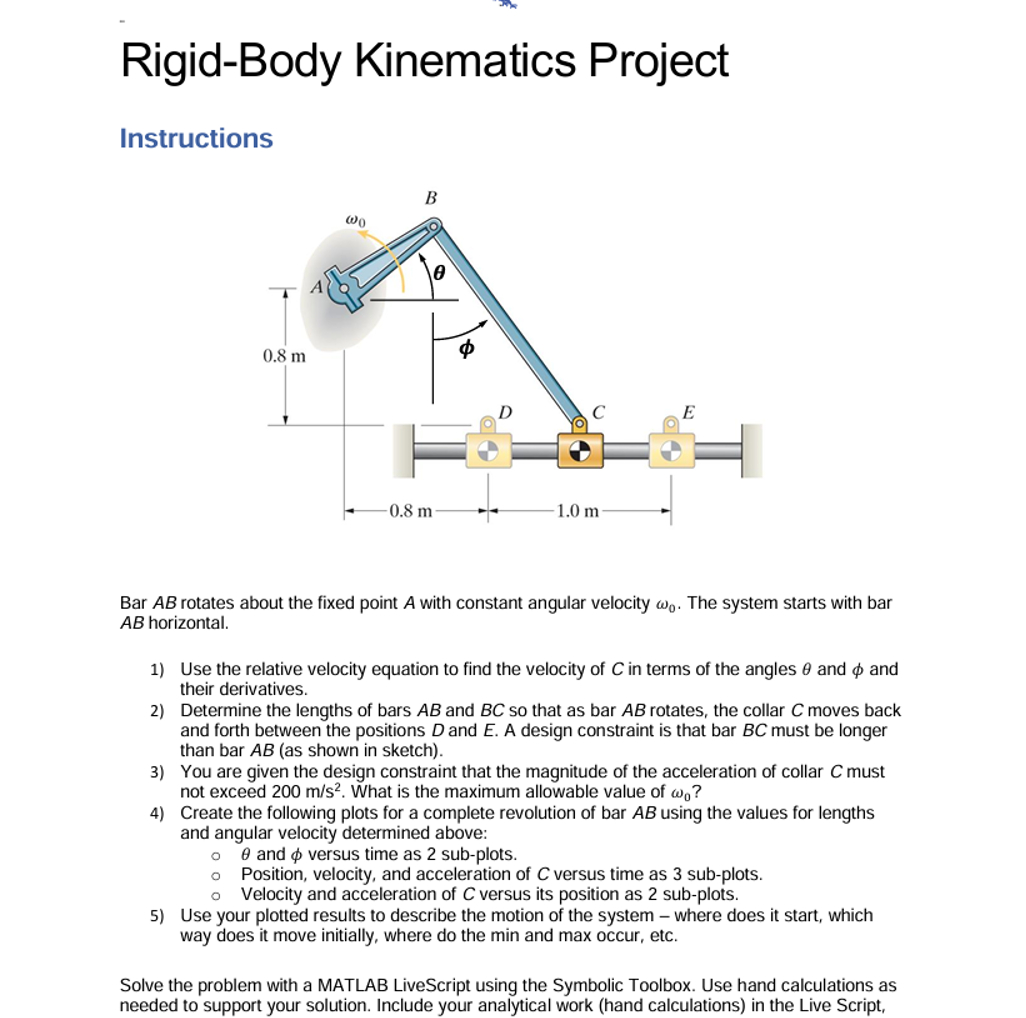
Question: HELP WITH HAND CALCULATIONS. Rigid - Body Kinematics Project Instructions Bar A B rotates about the fixed point A with constant angular velocity 0 .
HELP WITH HAND CALCULATIONS. RigidBody Kinematics Project
Instructions
Bar rotates about the fixed point A with constant angular velocity The system starts with bar
horizontal.
Use the relative velocity equation to find the velocity of in terms of the angles and and
their derivatives.
Determine the lengths of bars and so that as bar rotates, the collar moves back
and forth between the positions and A design constraint is that bar must be longer
than bar as shown in sketch
You are given the design constraint that the magnitude of the acceleration of collar must
not exceed What is the maximum allowable value of
Create the following plots for a complete revolution of bar using the values for lengths
and angular velocity determined above:
and versus time as subplots.
Position, velocity, and acceleration of versus time as subplots.
Velocity and acceleration of versus its position as subplots.
Use your plotted results to describe the motion of the system where does it start, which
way does it move initially, where do the min and max occur, etc.
Solve the problem with a MATLAB LiveScript using the Symbolic Toolbox. Use hand calculations as
needed to support your solution. Include your analytical work hand calculations in the Live Script.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock