

Question: I need help with changing the control method of a two - axis robotic arm from PID control to torque control in Simulink. I have
I need help with changing the control method of a twoaxis robotic arm from PID control to torque control in Simulink. I have attached an image showing the current Simulink diagram for PID control of the robot.
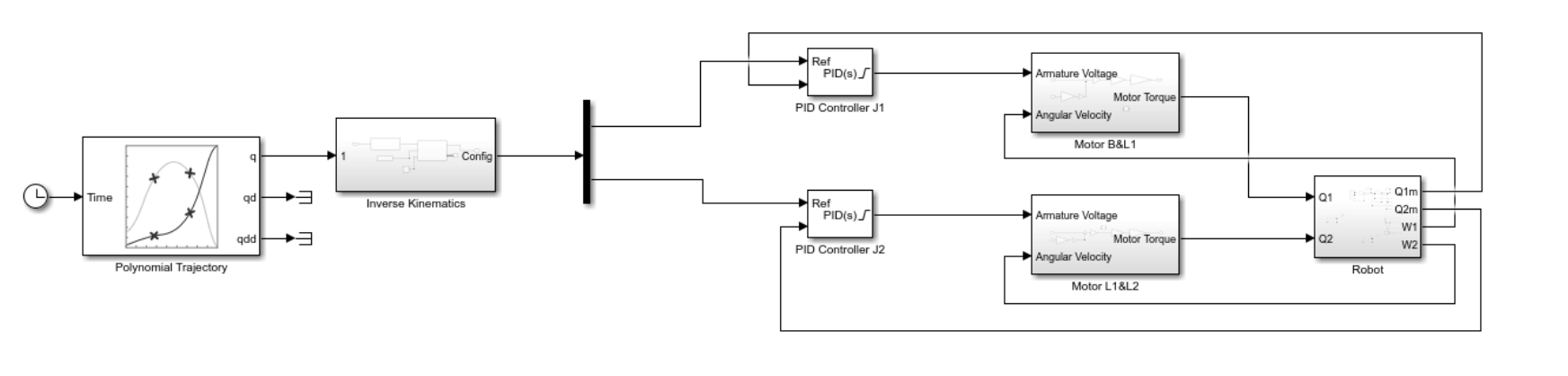
In this current setup:
Polynomial Trajectory block generates the desired positions, velocities, and accelerations.
The Inverse Kinematics block calculates the joint configurations.
Then, two PID controllers are used to control the arm's movement based on the desired joint positions and velocities.
However, I want to change the control strategy to torque control. Could you guide me on:
What changes I need to make to replace the PID controllers with torque control blocks?
How I can implement this new control strategy in Simulink?
Any specific blocks or logic I should use to achieve torquebased control.
Heres the attached Simulink image for reference:
In a torque control system for a robotic arm, the control objective is to directly control the torque applied to the robot's joints, rather than controlling the position or velocity like in a PIDcontrolled system. Key Components of Torque Control:
Torque Reference: Instead of controlling the position or velocity, you control the torque applied at each joint. The desired torque values are provided based on the task requirements or dynamics of the system.
Joint Dynamics: In torque control, the control input torque affects the joint accelerations, and these accelerations will determine the resulting velocities and positions of the robot.
Feedforward Model: You need a model of the robot's dynamics equations of motion to compute the torques required to achieve a specific motion or counter external forces. These equations are often derived from EulerLagrange or NewtonEuler methods. The dynamics involve:
InertiaCoriolis forcesGravitational forcesFriction, if modeled
Control Law: A torque controller generates torques that drive the system towards the desired state positionvelocity by solving these dynamics in realtime. Typically, a control law involves:
Desired torques based on the dynamic model.Feedback to adjust the torque based on current errors this could be proportional to error in some implementations
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock