

Question: I want to create a two MATLAB functions for a 3DoF system robotic arm that has yaw, pitch and pitch roatation. The first one is
I want to create a two MATLAB functions for a 3DoF system robotic arm that has yaw, pitch and pitch roatation. The first one is the forward kinematics that will give the position of the end effector for given angles. And second one is the inverse kinematics which will give the angles for the given positions. Use MATLAB symbollic toolbox.Joint 1 is yaw rotation, joint 2 and 3 are pitch rotations. 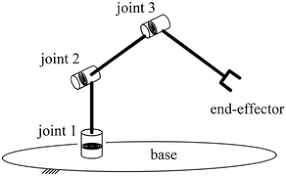
joint 3 joint 2 end-effector joint 1 base joint 3 joint 2 end-effector joint 1 base
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock