

Question: . I would appreciate Matlab code. The figure shows the pendulum on a cart system. The position of the cart measured from the origin is
 .
.
I would appreciate Matlab code.
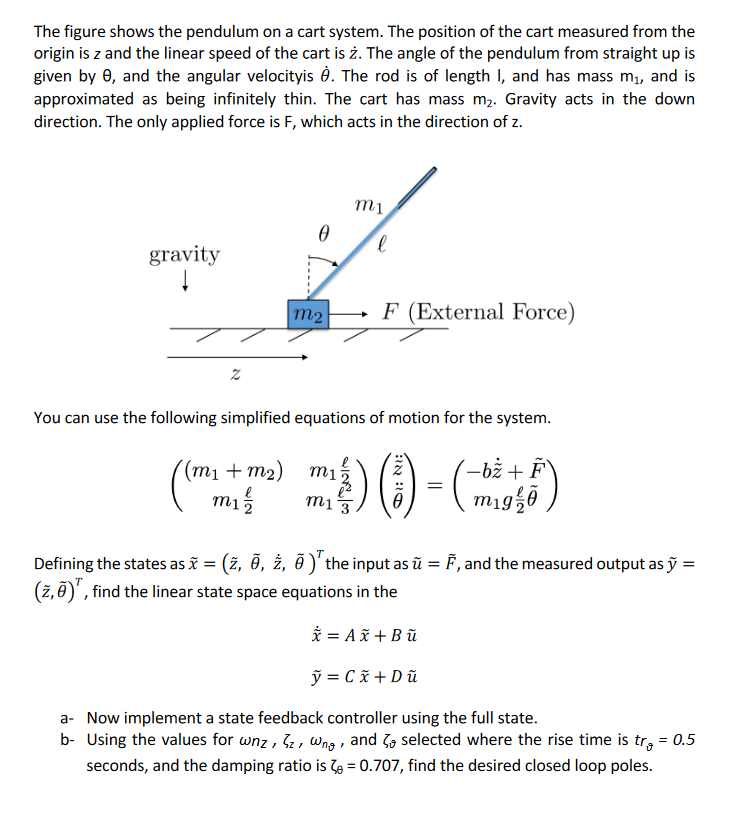
The figure shows the pendulum on a cart system. The position of the cart measured from the origin is z and the linear speed of the cart is . The angle of the pendulum from straight up is given by 0, and the angular velocityis . The rod is of length I, and has mass m, and is approximated as being infinitely thin. The cart has mass m2. Gravity acts in the down direction. The only applied force is F, which acts in the direction of z. mi e gravity m2 F (External Force) 2 You can use the following simplified equations of motion for the system. (mi + m2) mi mis -b + F war Defining the states as = (, 7, , 7)"the input as = }, and the measured output as = (,), find the linear state space equations in the * = A + B = C + D a- Now implement a state feedback controller using the full state. b- Using the values for wnz, Sz, wng, and Go selected where the rise time is try = 0.5 seconds, and the damping ratio is 28 = 0.707, find the desired closed loop poles. The figure shows the pendulum on a cart system. The position of the cart measured from the origin is z and the linear speed of the cart is . The angle of the pendulum from straight up is given by 0, and the angular velocityis . The rod is of length I, and has mass m, and is approximated as being infinitely thin. The cart has mass m2. Gravity acts in the down direction. The only applied force is F, which acts in the direction of z. mi e gravity m2 F (External Force) 2 You can use the following simplified equations of motion for the system. (mi + m2) mi mis -b + F war Defining the states as = (, 7, , 7)"the input as = }, and the measured output as = (,), find the linear state space equations in the * = A + B = C + D a- Now implement a state feedback controller using the full state. b- Using the values for wnz, Sz, wng, and Go selected where the rise time is try = 0.5 seconds, and the damping ratio is 28 = 0.707, find the desired closed loop poles
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts