

Question: IIL. It is required to develop a path planning algorithm for a mobile robot (Figure 3) to navigate within an office environment (Figure 4). The
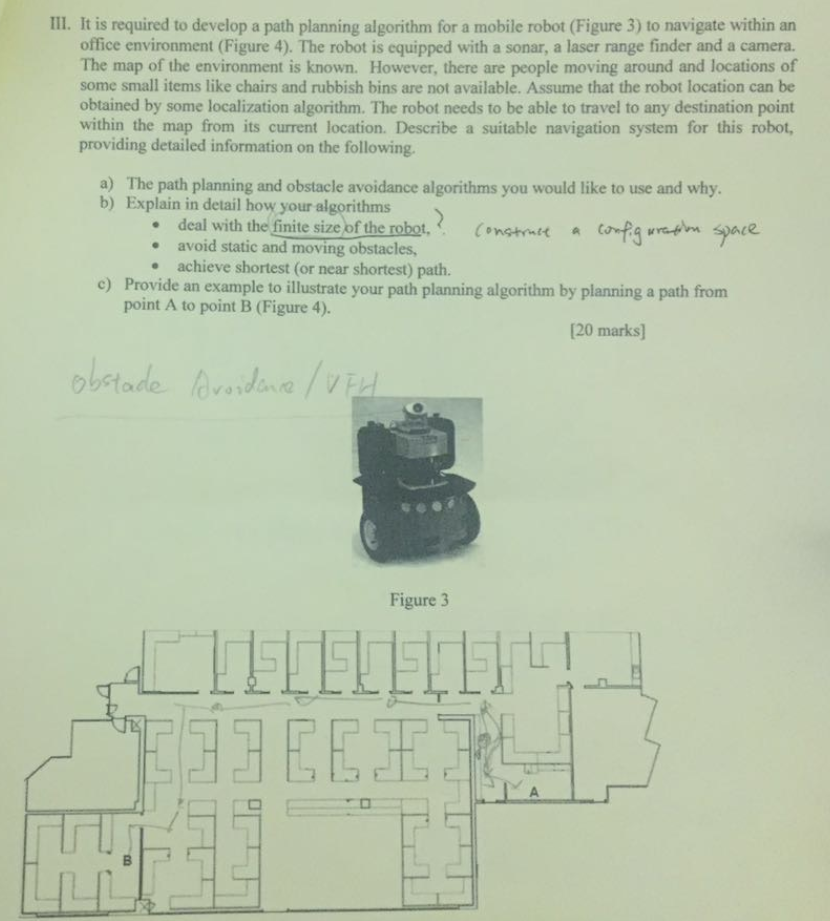
IIL. It is required to develop a path planning algorithm for a mobile robot (Figure 3) to navigate within an office environment (Figure 4). The robot is equipped with a sonar, a laser range finder and a camera. The map of the environment is known. However, there are people moving around and locations of some small items like chairs and rubbish bins are not available. Assume that the robot location can be obtained by some localization algorithm. The robot needs to be able to travel to any destination point within the map from its current location. Describe a suitable navigation system for this robot, providing detailed information on the following. a) The path planning and obstacle avoidance algorithms you would like to use and why. b) Explain in detail how your algorithms deal with the finite size of the robot.Cntmtt o e avoid static and moving obstacles achieve shortest (or near shortest) path. . c) Provide an example to illustrate your path planning algorithm by planning a path from point A to point B (Figure 4). 20 marks] Figure 3 LI
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts