

Question: Image - based homing for robots can be implemented by generating heading com - mand inputs to a steering system based on the following guidance
Imagebased homing for robots can be implemented by generating heading com
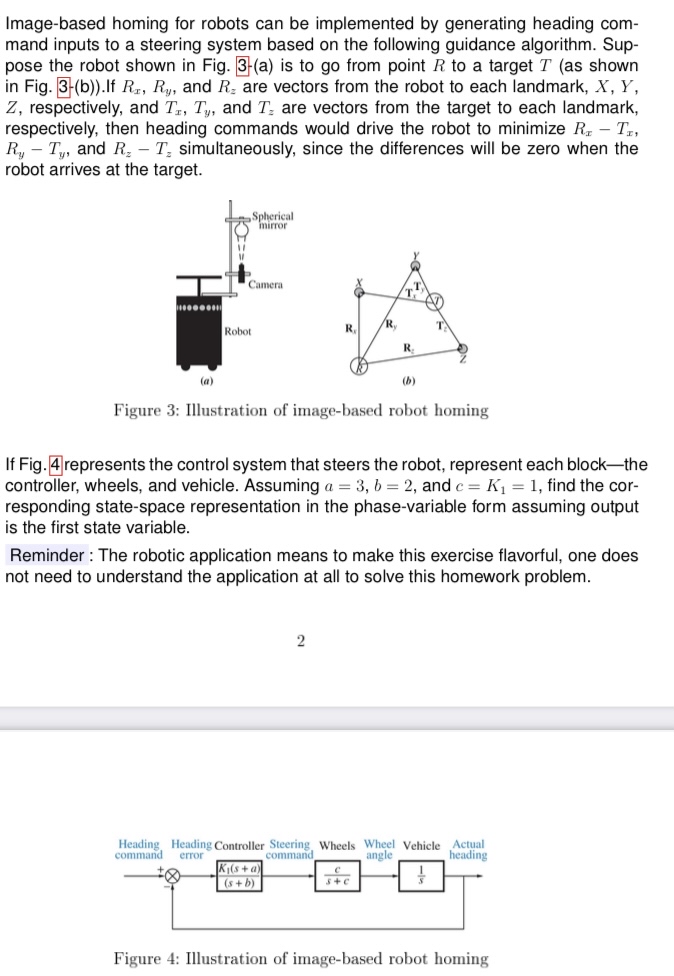
mand inputs to a steering system based on the following guidance algorithm. Sup
pose the robot shown in Fig. a is to go from point to a target as shown
in Fig. b If and are vectors from the robot to each landmark,
respectively, and and are vectors from the target to each landmark,
respectively, then heading commands would drive the robot to minimize
and simultaneously, since the differences will be zero when the
robot arrives at the target.
Figure : Illustration of imagebased robot homing
If Fig. represents the control system that steers the robot, represent each blockthe
controller, wheels, and vehicle. Assuming and find the cor
responding statespace representation in the phasevariable form assuming output
is the first state variable.
Reminder : The robotic application means to make this exercise flavorful, one does
not need to understand the application at all to solve this homework problem.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock