

Question: import numpy as _#(2 points) import matplotlib.pyplot as plt from Register_Arun_3D import register_Arun_3D # Import fixed data points fixed = np. _(delimiter='') #12 points) #
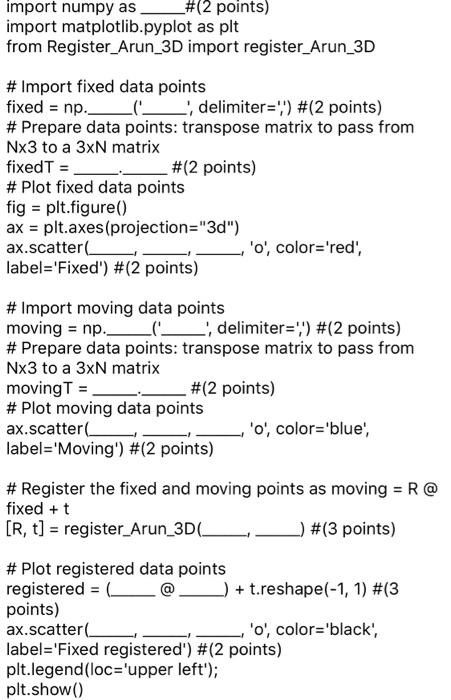
import numpy as _#(2 points) import matplotlib.pyplot as plt from Register_Arun_3D import register_Arun_3D # Import fixed data points fixed = np. _(delimiter='') #12 points) # Prepare data points: transpose matrix to pass from Nx3 to a 3x matrix fixedT = #(2 points) # Plot fixed data points fig = plt.figure() ax = plt.axes(projection="3d") ax.scatter ,'o', color='red', label='Fixed') #(2 points) # Import moving data points moving = np. _(___, delimiter=') #(2 points) # Prepare data points: transpose matrix to pass from Nx3 to a 3x matrix movingT = #(2 points) # Plot moving data points ax.scatter 'o', color='blue' label='Moving') #(2 points) # Register the fixed and moving points as moving = R@ fixed + t [R, t] = register_Arun_3D(_ _) #(3 points) # Plot registered data points registered = @ _) + t.reshape(-1, 1) #(3 points) ax.scatter ,'o', color='black', label='Fixed registered') #(2 points) plt.legend(loc="upper left'); plt.show() # Enlarge figure, notice the black dots (search until you find, the black dots # are almost not noticeable because the registration is almost perfect). # To convince yourself, rerun code without plotting the registered points this time. # Submit a PDF document, where you include the two figures and draw on one of them to #show the location of the fixed points that were registered onto the moving points. (5 points) import numpy as _#(2 points) import matplotlib.pyplot as plt from Register_Arun_3D import register_Arun_3D # Import fixed data points fixed = np. _(delimiter='') #12 points) # Prepare data points: transpose matrix to pass from Nx3 to a 3x matrix fixedT = #(2 points) # Plot fixed data points fig = plt.figure() ax = plt.axes(projection="3d") ax.scatter ,'o', color='red', label='Fixed') #(2 points) # Import moving data points moving = np. _(___, delimiter=') #(2 points) # Prepare data points: transpose matrix to pass from Nx3 to a 3x matrix movingT = #(2 points) # Plot moving data points ax.scatter 'o', color='blue' label='Moving') #(2 points) # Register the fixed and moving points as moving = R@ fixed + t [R, t] = register_Arun_3D(_ _) #(3 points) # Plot registered data points registered = @ _) + t.reshape(-1, 1) #(3 points) ax.scatter ,'o', color='black', label='Fixed registered') #(2 points) plt.legend(loc="upper left'); plt.show() # Enlarge figure, notice the black dots (search until you find, the black dots # are almost not noticeable because the registration is almost perfect). # To convince yourself, rerun code without plotting the registered points this time. # Submit a PDF document, where you include the two figures and draw on one of them to #show the location of the fixed points that were registered onto the moving points. (5 points)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts