

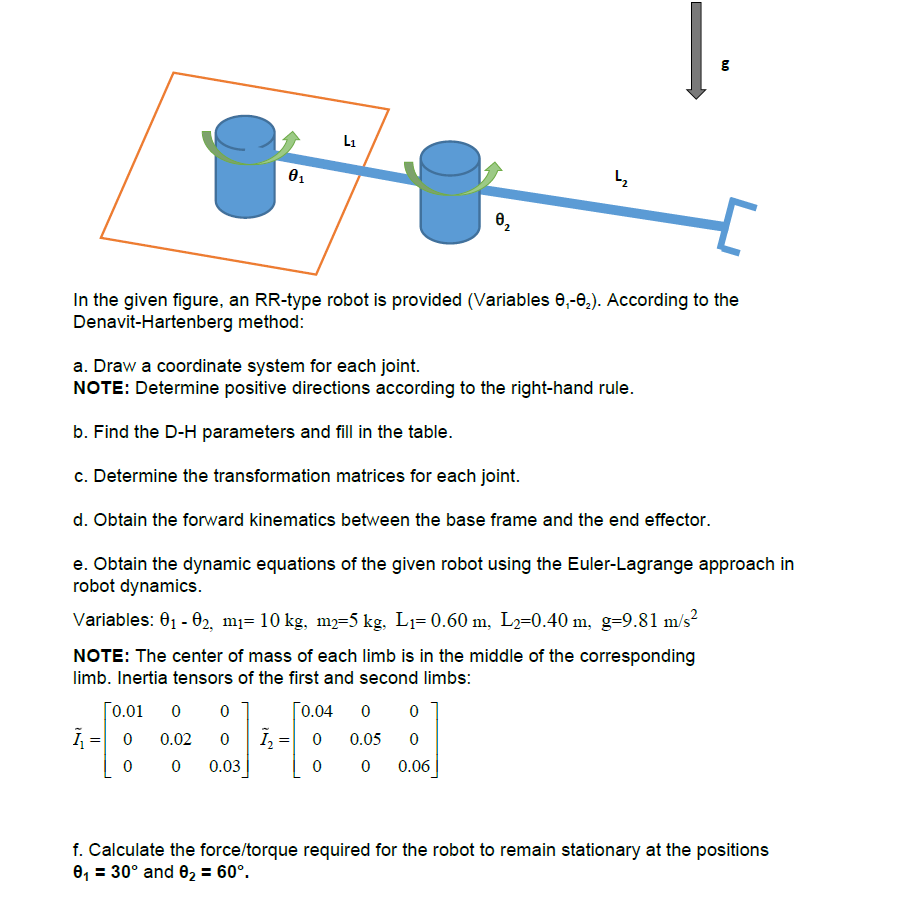
Question: In the given figure, an RR - type robot is provided ( Variables 1 - 2 ) . According to the Denavit - Hartenberg method:
In the given figure, an RRtype robot is provided Variables According to the DenavitHartenberg method:
a Draw a coordinate system for each joint.
NOTE: Determine positive directions according to the righthand rule.
b Find the DH parameters and fill in the table.
c Determine the transformation matrices for each joint.
d Obtain the forward kinematics between the base frame and the end effector.
e Obtain the dynamic equations of the given robot using the EulerLagrange approach in robot dynamics.
Variables:
NOTE: The center of mass of each limb is in the middle of the corresponding
limb Inertia tensors of the first and second limbs:
tildetilde
f Calculate the forcetorque required for the robot to remain stationary at the positions
and
Please provide your solution step by step with explanations.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock