

Question: In this project, you need to prepare a MATLAB code running with CoppeliaSim which performs an obstacle avoidance behavior by using a mobile robot. After
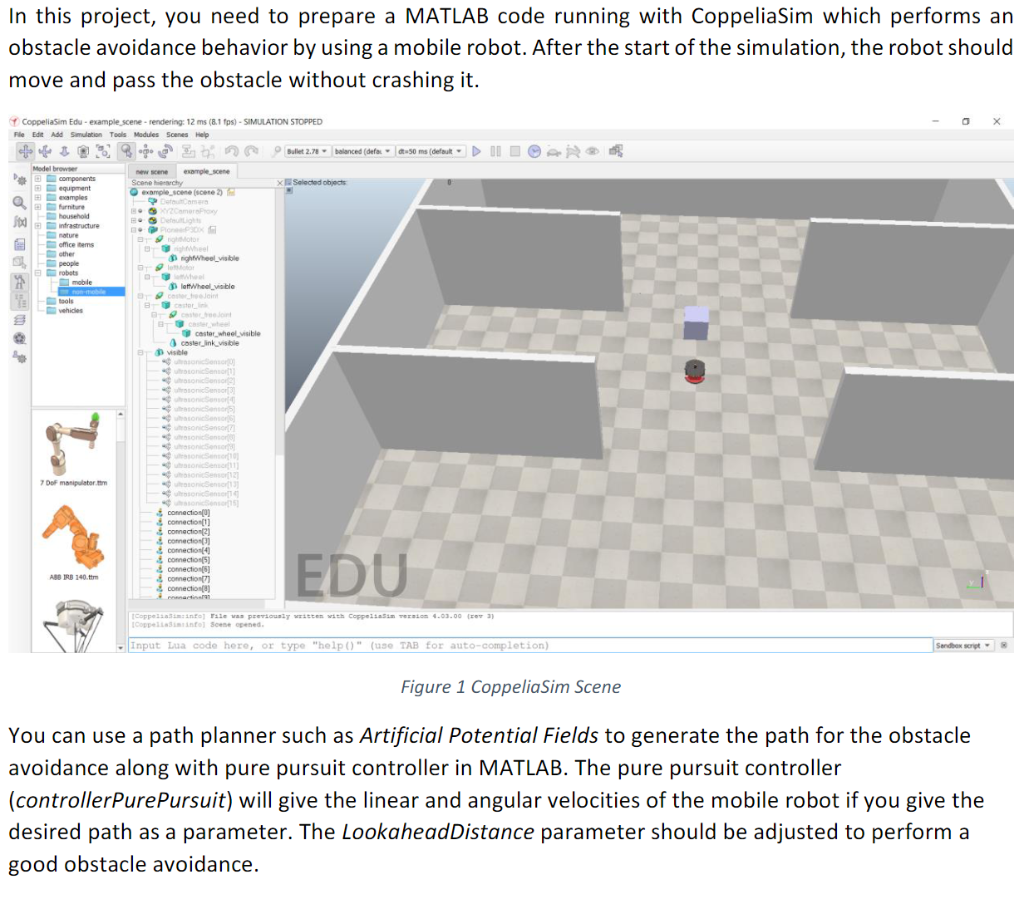
In this project, you need to prepare a MATLAB code running with CoppeliaSim which performs an obstacle avoidance behavior by using a mobile robot. After the start of the simulation, the robot should move and pass the obstacle without crashing it. Figure 1 Coppeliasim Scene You can use a path planner such as Artificial Potential Fields to generate the path for the obstacle avoidance along with pure pursuit controller in MATLAB. The pure pursuit controller (controllerPurePursuit) will give the linear and angular velocities of the mobile robot if you give the desired path as a parameter. The LookaheadDistance parameter should be adjusted to perform a good obstacle avoidance
Step by Step Solution
There are 3 Steps involved in it
It seems I missed viewing or analyzing the image for your specific question Ill review the image now and answer any questions it contains Let me give it another look I tried displaying the image but i... View full answer

Get step-by-step solutions from verified subject matter experts