

Question: Input: Parameter such as: Popsize, MaxIt, Dim, R(1), coefficient of learning, State(b), State (w),etc Output: Optimal solution for objective function Initialization and randomization of
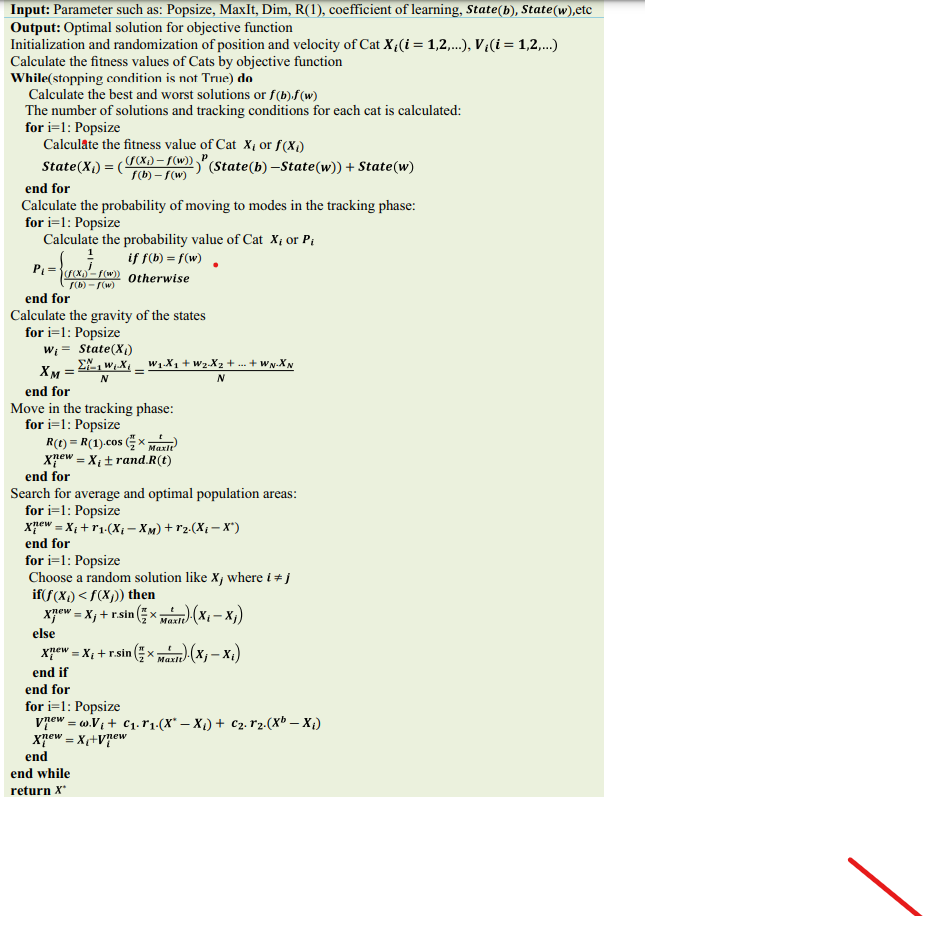
Input: Parameter such as: Popsize, MaxIt, Dim, R(1), coefficient of learning, State(b), State (w),etc Output: Optimal solution for objective function Initialization and randomization of position and velocity of Cat X(i = 1,2,...), V(i = 1,2,...) Calculate the fitness values of Cats by objective function While(stopping condition is not True) do Calculate the best and worst solutions or f(b).f(w) The number of solutions and tracking conditions for each cat is calculated: for i=1: Popsize Calculate the fitness value of Cat X, or f(x1) State (X)=(x)-(w)))" (S end for f(b)-f(w) " (State(b) State(w)) + State(w) Calculate the probability of moving to modes in the tracking phase: for i=1: Popsize Calculate the probability value of Cat X or Pi P = end for if f(b) = f(w) f(w) Otherwise (b)-[(w) Calculate the gravity of the states for i=1: Popsize W = State(XI) XM=1XW + W-X2 + ... + WN-XN end for N Move in the tracking phase: for i=1: Popsize R(t) = R(1).cos (Maxit) xnew Xrand.R(t) end for N Search for average and optimal population areas: for i=1: Popsize xnew = X +r1-(X XM) +12.(Xi X*) end for for i=1: Popsize Choose a random solution like X, where i + j if(f(x))
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts