

Question: Least Squares for Robotics ( 1 6 points ) Robots rely on sensors for understanding their environment and navigating in the real world. These sensors
Least Squares for Robotics points
Robots rely on sensors for understanding their environment and navigating in the real world. These sensors must be calibrated to ensure accurate measurements, which we explore in this problem.
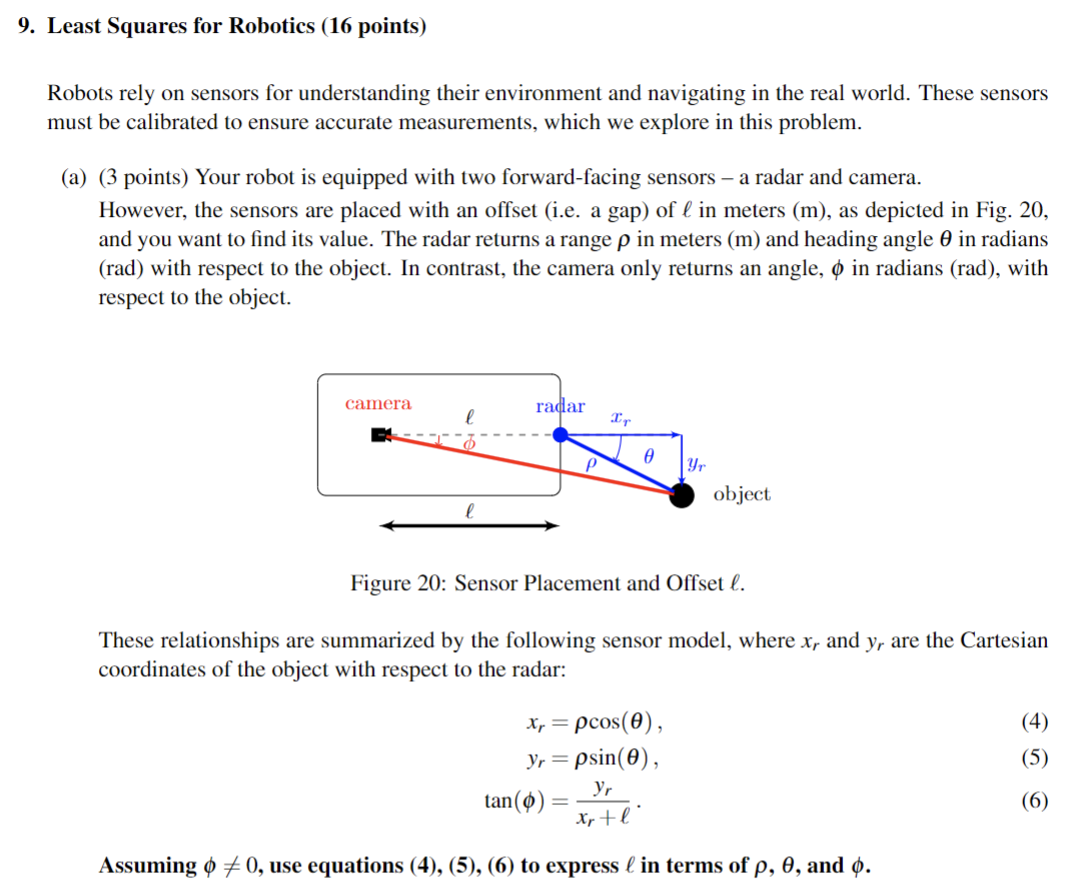
a points Your robot is equipped with two forwardfacing sensors a radar and camera. However, the sensors are placed with an offset ie a gap of l in meters m as depicted in Fig. and you want to find its value. The radar returns a range rho in meters m and heading angle theta in radians rad with respect to the object. In contrast, the camera only returns an angle, phi in radians rad with respect to the object.
Figure : Sensor Placement and Offset l
These relationships are summarized by the following sensor model, where xr and yr are the Cartesian coordinates of the object with respect to the radar:
xrrho costheta
yrrho sintheta
tanphi yrxrl
Assuming phi use equations to express l in terms of rho theta and phi
b points Often it is difficult to precisely identify the value of l To learn the value of l you decide to
take a series of measurements. In particular, you take N measurements and get the equations:
aleibi
for iN Here a is a fixed and known constant. Each bi represents your ith measurement and
ei represents the error in your measurement. While you know all of the bi values, you do not know the
error values ei
We can write this equation in a vector format as:
Alvecevecb
where AavdotsaveceevdotseNvecbbvdotsbN
In this simple D case, the least squares solution is a scaled version of the average of biiN
Find the best estimate for l denoted as hatl using least squares. Simplify your expression and
express hatl in terms of abi and N Your answer may not include any vector notation.
Note: A is a vector and not a matrix.
c points Now we turn to the task of controlling the robot's velocity and acceleration, which is a key
requirement for navigation.
We use the following model for the robot, which describes how the velocity and acceleration of the
robot changes with timestep k :
vkakvkakjk
where
k is the timestep;
vk is the velocity state at timestep k;
ak is the acceleration state at timestep k;
jk is the jerk derivative of acceleration control input at timestep k
We start at a known initial state va and we want to find j to set va as close to as
possible. For this, we minimize:
Eva
Find the best estimate for the optimal choice of jerk, hatj by using least squares method to
minimize E Express your solution in terms of v and a Show your work.
Hint: Rewrite E in terms of j and other relevant terms.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock