

Question: Matlab Question Built-in models are very useful to be able to practice and work on real life robots and practice kinematics, perform the following steps:
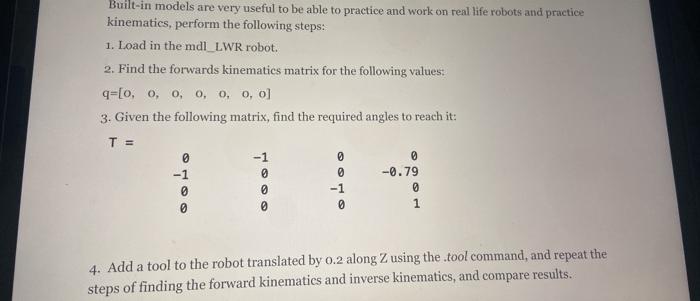
Built-in models are very useful to be able to practice and work on real life robots and practice kinematics, perform the following steps: 1. Load in the mdl LWR robot. 2. Find the forwards kinematics matrix for the following values: q=[0, 0, 0, 0, 0, 0, 0] 3. Given the following matrix, find the required angles to reach it: T = 0 -1 0 0 -0.79 0 0 0 0 1 4. Add a tool to the robot translated by 0.2 along Z using the tool command, and repeat the steps of finding the forward kinematics and inverse kinematics, and compare results. Built-in models are very useful to be able to practice and work on real life robots and practice kinematics, perform the following steps: 1. Load in the mdl LWR robot. 2. Find the forwards kinematics matrix for the following values: q=[0, 0, 0, 0, 0, 0, 0] 3. Given the following matrix, find the required angles to reach it: T = 0 -1 0 0 -0.79 0 0 0 0 1 4. Add a tool to the robot translated by 0.2 along Z using the tool command, and repeat the steps of finding the forward kinematics and inverse kinematics, and compare results
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts