

Question: NCH4202 Project 4: Autonomous Navigation In this project, you necd to prepare a MATLAE code running with Coppeliasiri which will run a localization algonithm such
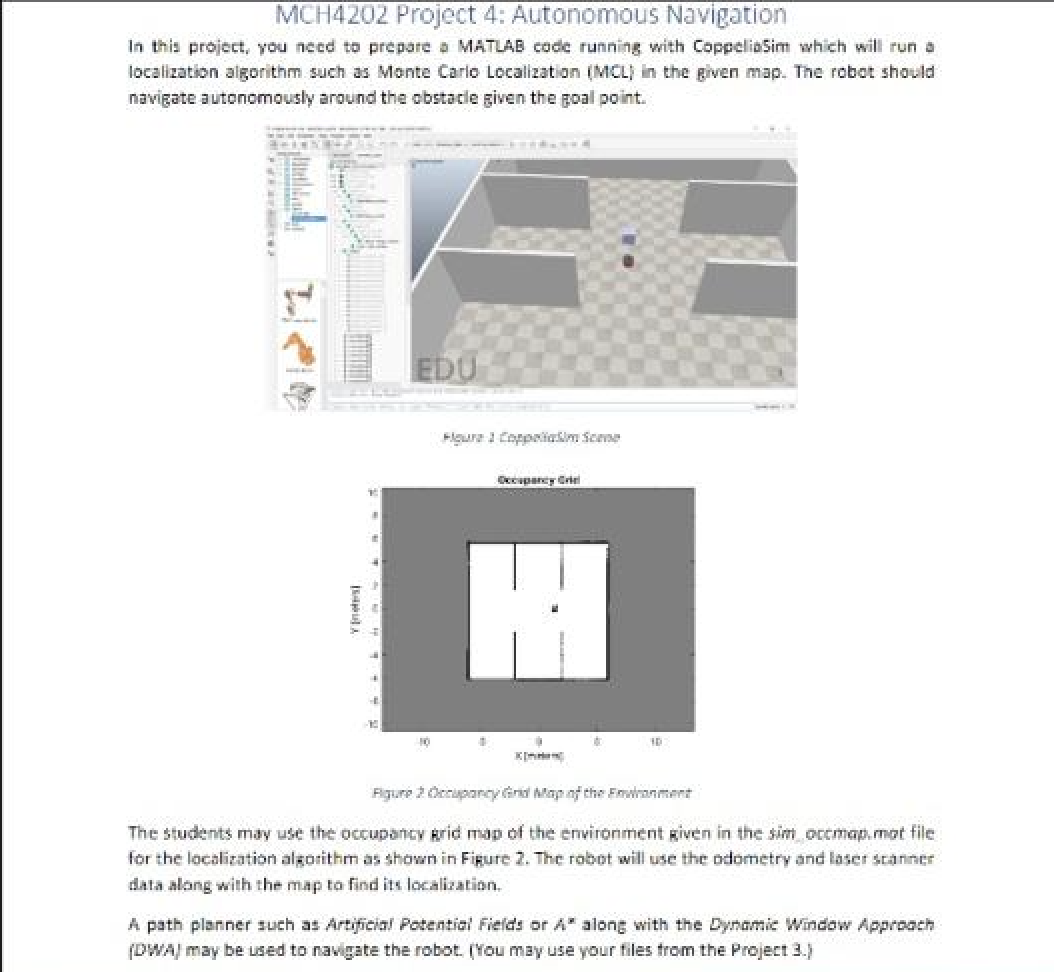
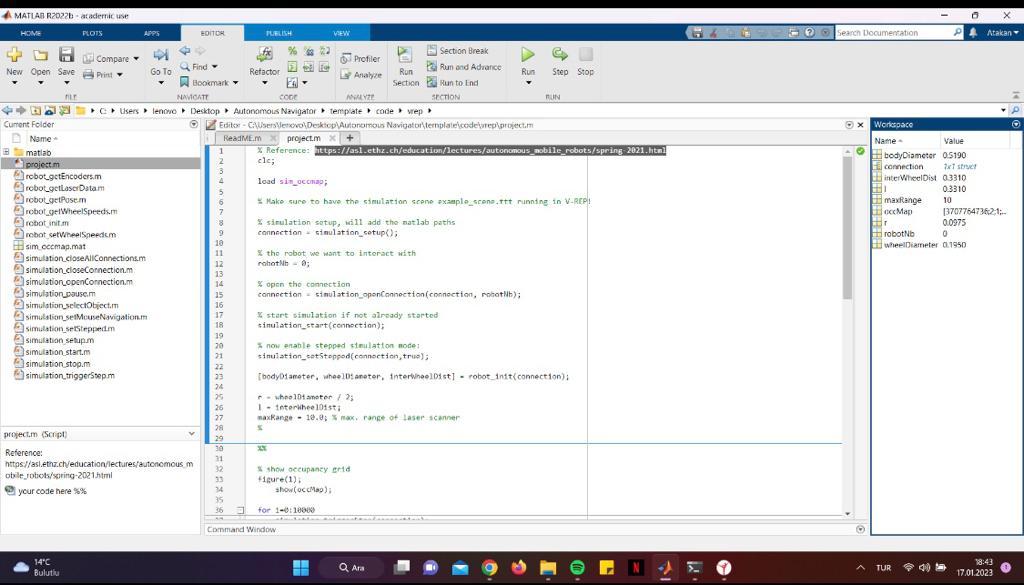
NCH4202 Project 4: Autonomous Navigation In this project, you necd to prepare a MATLAE code running with Coppeliasiri which will run a localization algonithm such as Monte Carlo Localization (MCL) in the given map. The robot should navigate autonomously around the obstacle given the goal point. -heva 2 Enpexing Gune Pgure 2 horupancyitid Mapat the Fnumaniment The students may use the occupancy krid map of the environment kiven in the sim occmapimot file for the localication alkotithm as shown in Figure 2 . The robot will use the odometry and laser stariner data along with the map to find its localiation. A path planner such as Artificial Potentiol fields or A alone with the Dynanic Window Approoch (DWA/ may be used to navlgate the robot. (rou may use your files trom the Project 1.) 4 MATLAI R2022b - atademic wSe A MATLAB R2022b - academic use A MATLAB R2022b - academic use
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts