

Question: Now we consider motor shaft position / angle ( t ) as our output. We study position control ( not speed control ) with a
Now we consider motor shaft positionangle as our output. We study position control not speed control with a closed loop PID controller and unity feedback. We consider a reference step input and reference ramp input
For DC motor position control, we use the transfer function given as
where the term acts to integrate the velocity and thus give motor shaft angle
Consider proportional control and set
a System type.
i Assuming stability, what is the system type? Why
ii Based on system type, what can you say about steadystate error to step Does this agree with your results from the Final Value Theorem in LAB
iii. Based on system type, what can you say about steadystate error to ramp Does this agree with your results from the Final Value Theorem?
iv How does the information provided by the Final Value Theorem prediction of steady state error differ from that provided by system type?
b Stability & Performance.
i Using the Routh Array, determine values of the gain that stabilize the system.
ii For a stable system, based on your Final Value Theorem results from LAB PRELAB, how can you reduce the expected steady state error in response to step
iii. For a stable system, based on your Final Value Theorem results from LAB PRELAB, how can you reduce the expected steady state error in response to ramp
Consider proportionalintegral PI control and set with both and nonzero. We have added an integrator to the forward path!
c System type
i Assuming stability, what is the system type? Why
ii Based on system type, what can you say about steadystate error to step Does this agree with your results from the Final Value Theorem in LAB
iii. Based on system type, what can you say about steadystate error to ramp Does this agree with your results from the Final Value Theorem in LAB
d Stability & Performance.
i Set and, using the Routh Array, determine values of the gain that stabilize the system.
ii Set and, using the Routh Array, determine values of the gain that stabilize the system.
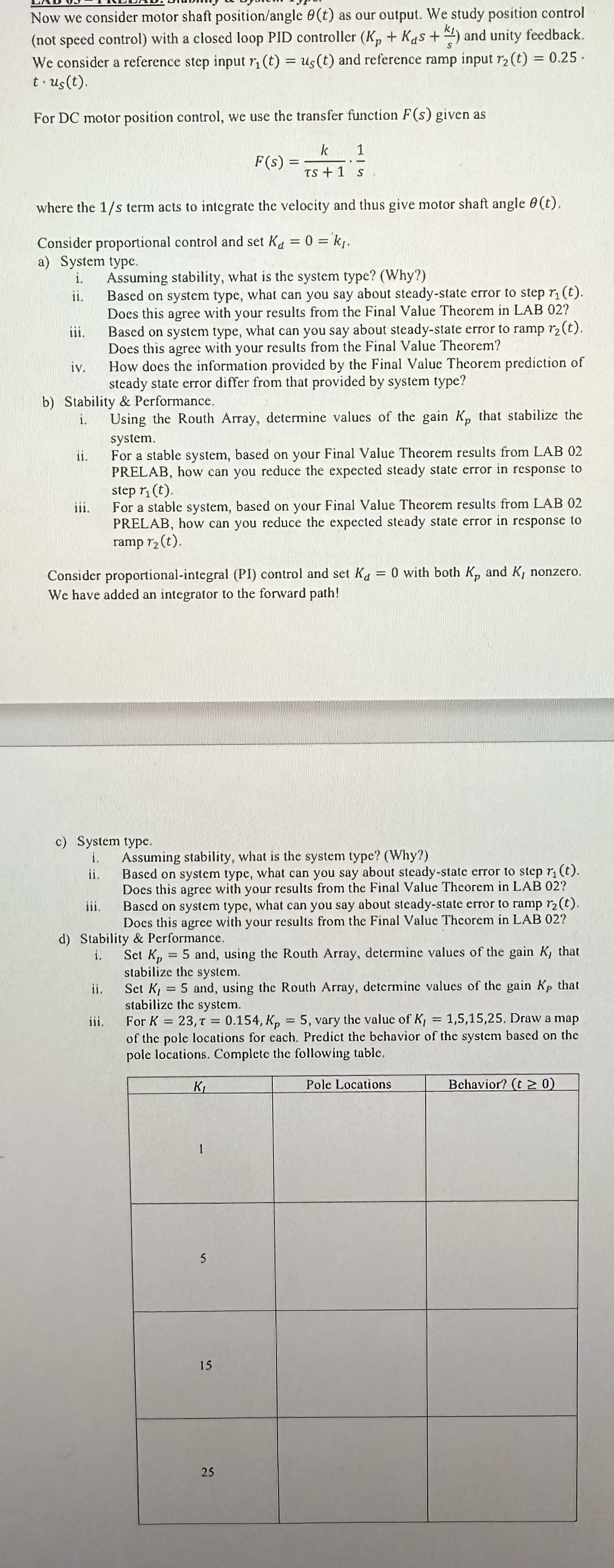
iii. For vary the value of Draw a map of the pole locations for each. Predict the behavior of the system based on the pole locations. Complete the following table
tablePole Locations,Behavior?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock