

Question: page 898 692 Chapter 11 Discrete Optimization Models plus 112 + x3 + x1s=1 32.1 + 124 + 126 = 1 X3 + x34 +
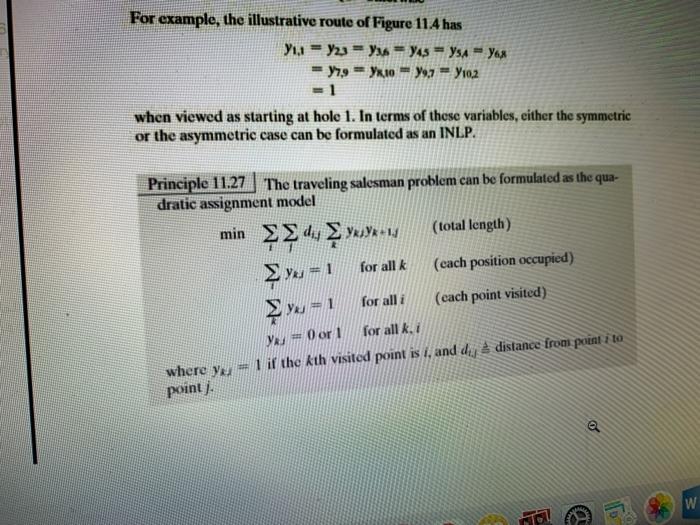
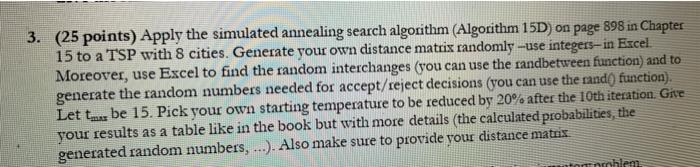
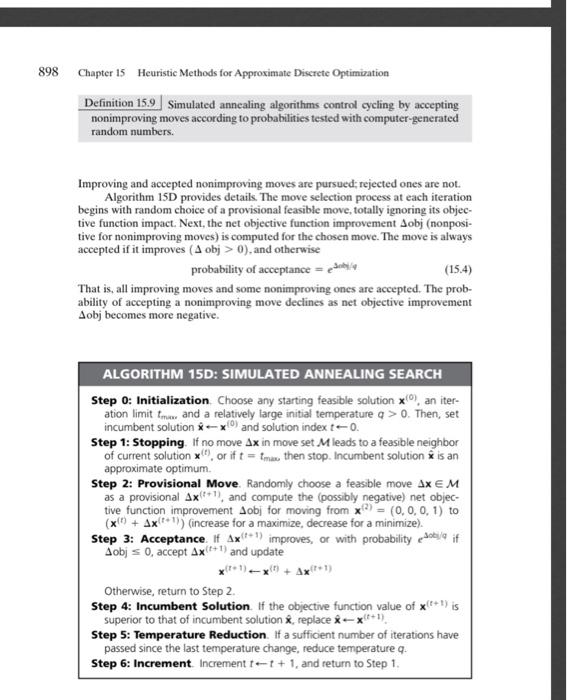
692 Chapter 11 Discrete Optimization Models plus 112 + x3 + x1s=1 32.1 + 124 + 126 = 1 X3 + x34 + x3 = 1 14.2 + 443 + 146 = 1 IS1 + 153 2 otto - 1 (d) To avoid any subtour among nodes in S = (1.3,5), we add subtour climina- tion constraint. 4 + 1 + Xsn = 1 Quadratic Assignment Formulation of the TSP There are an enormous number of subtour elmination constraints for a TSP on even a modest number of points. That is why it is sometimes easier-especially in developing heuristic procedures of Chapter 15-to deal with a TSP formulation having simpler constraints. We can accomplish this, at the cost of making the objective function non- lincar, by formulating the TSP as a quadratic assignment (QAP) modelil.16. Think of the tour as a sequence or permutation of the points to be visited. Decision variables in the OAP form assign sequence positions k to points that is. ilkth point visited ist otherwise 3. (25 points) Apply the simulated annealing search algorithm (Algorithm 15D) on page 898 in Chapter 15 to a TSP with 8 cities. Generate your own distance matrix randomly-use integers, in Excel Moreover, use Excel to find the random interchanges (you can use the randbetween function) and to generate the random numbers needed for accept/reject decisions (you can use the rande) function). Let to be 15. Pick your own starting temperature to be reduced by 20% after the 10th iteration. Give your results as a table like in the book but with more details (the calculated probabilities, the generated random numbers, ...). Also make sure to provide your distance matus Forthlem 898 Chapter 15 Heuristic Methods for Approximate Discrete Optimization Definition 15.9 Simulated annealing algorithms control cycling by accepting nonimproving moves according to probabilities tested with computer-generated random numbers. Improving and accepted nonimproving moves are pursued rejected ones are not. Algorithm 15D provides details. The move selection process at each iteration begins with random choice of a provisional feasible move, totally ignoring its objec- tive function impact. Next, the net objective function improvement Aobj (nonposi- tive for nonimproving moves) is computed for the chosen move. The move is always accepted if it improves (A obj > 0), and otherwise probability of acceptance = debe (15.4) That is, all improving moves and some nonimproving ones are accepted. The prob- ability of accepting a nonimproving move declines as net objective improvement Aobj becomes more negative. ALGORITHM 15D: SIMULATED ANNEALING SEARCH Step O: Initialization Choose any starting feasible solution ), an iter- ation limit tm and a relatively large initial temperature a > 0. Then, set incumbent solution - x) and solution index t-0. Step 1: Stopping If no move ax in move set M leads to a feasible neighbor of current solution x, or if t = min. then stop. Incumbent solution is an approximate optimum Step 2: Provisional Move. Randomly choose a feasible move AxEM as a provisional Ax+1), and compute the possibly negative) net objec- tive function improvement Aobj for moving from X) = (0,0,0.1) to (x) + Ax**)) (increase for a maximize, decrease for a minimize). Step 3: Acceptance. If Ax) improves, or with probability doble if Aobj = 0, accept Ax(+1) and update Otherwise, return to Step 2. Step 4: Incumbent Solution if the objective function value of xfelis superior to that of incumbent solution X replace --x+1) Step 5: Temperature Reduction If a sufficient number of iterations have passed since the last temperature change, reduce temperature q. Step 6: Increment Increment tot + 1. and return to Step 1. 692 Chapter 11 Discrete Optimization Models plus 112 + x3 + x1s=1 32.1 + 124 + 126 = 1 X3 + x34 + x3 = 1 14.2 + 443 + 146 = 1 IS1 + 153 2 otto - 1 (d) To avoid any subtour among nodes in S = (1.3,5), we add subtour climina- tion constraint. 4 + 1 + Xsn = 1 Quadratic Assignment Formulation of the TSP There are an enormous number of subtour elmination constraints for a TSP on even a modest number of points. That is why it is sometimes easier-especially in developing heuristic procedures of Chapter 15-to deal with a TSP formulation having simpler constraints. We can accomplish this, at the cost of making the objective function non- lincar, by formulating the TSP as a quadratic assignment (QAP) modelil.16. Think of the tour as a sequence or permutation of the points to be visited. Decision variables in the OAP form assign sequence positions k to points that is. ilkth point visited ist otherwise 3. (25 points) Apply the simulated annealing search algorithm (Algorithm 15D) on page 898 in Chapter 15 to a TSP with 8 cities. Generate your own distance matrix randomly-use integers, in Excel Moreover, use Excel to find the random interchanges (you can use the randbetween function) and to generate the random numbers needed for accept/reject decisions (you can use the rande) function). Let to be 15. Pick your own starting temperature to be reduced by 20% after the 10th iteration. Give your results as a table like in the book but with more details (the calculated probabilities, the generated random numbers, ...). Also make sure to provide your distance matus Forthlem 898 Chapter 15 Heuristic Methods for Approximate Discrete Optimization Definition 15.9 Simulated annealing algorithms control cycling by accepting nonimproving moves according to probabilities tested with computer-generated random numbers. Improving and accepted nonimproving moves are pursued rejected ones are not. Algorithm 15D provides details. The move selection process at each iteration begins with random choice of a provisional feasible move, totally ignoring its objec- tive function impact. Next, the net objective function improvement Aobj (nonposi- tive for nonimproving moves) is computed for the chosen move. The move is always accepted if it improves (A obj > 0), and otherwise probability of acceptance = debe (15.4) That is, all improving moves and some nonimproving ones are accepted. The prob- ability of accepting a nonimproving move declines as net objective improvement Aobj becomes more negative. ALGORITHM 15D: SIMULATED ANNEALING SEARCH Step O: Initialization Choose any starting feasible solution ), an iter- ation limit tm and a relatively large initial temperature a > 0. Then, set incumbent solution - x) and solution index t-0. Step 1: Stopping If no move ax in move set M leads to a feasible neighbor of current solution x, or if t = min. then stop. Incumbent solution is an approximate optimum Step 2: Provisional Move. Randomly choose a feasible move AxEM as a provisional Ax+1), and compute the possibly negative) net objec- tive function improvement Aobj for moving from X) = (0,0,0.1) to (x) + Ax**)) (increase for a maximize, decrease for a minimize). Step 3: Acceptance. If Ax) improves, or with probability doble if Aobj = 0, accept Ax(+1) and update Otherwise, return to Step 2. Step 4: Incumbent Solution if the objective function value of xfelis superior to that of incumbent solution X replace --x+1) Step 5: Temperature Reduction If a sufficient number of iterations have passed since the last temperature change, reduce temperature q. Step 6: Increment Increment tot + 1. and return to Step 1
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts