

Question: Physical Model with Parameter Identification m = pendulum mass = 1 . 8 1 5 k g m s p r i n g =
Physical Model
with
Parameter Identification
pendulum mass
spring mass
unstretched spring length
spring constant
acceleration due to gravity
pretension of spring
static spring stretch, ie
dynamic spring stretch
total spring stretch
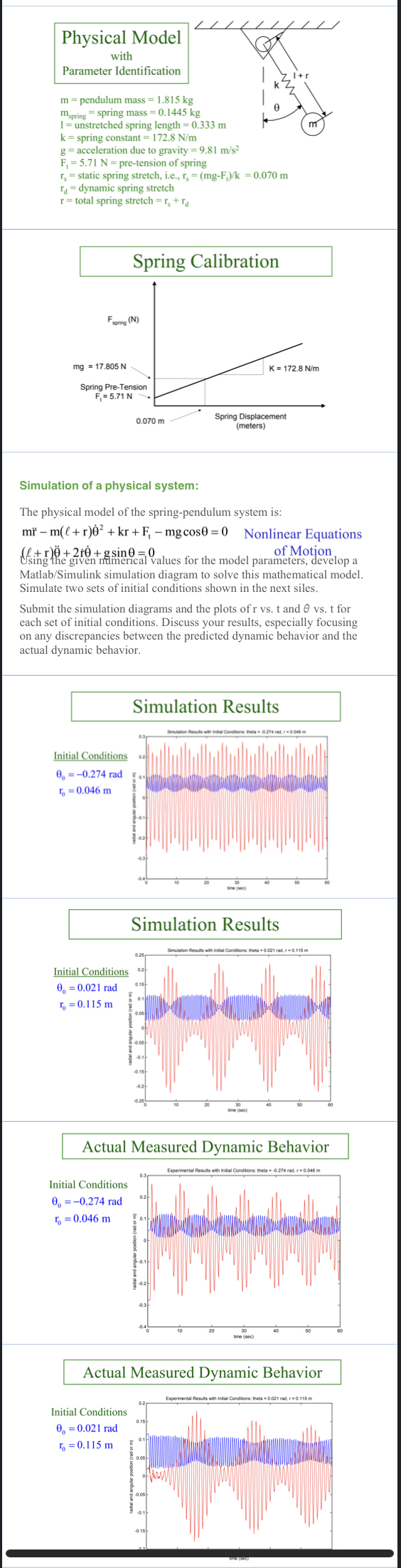
Simulation of a physical system:
The physical model of the springpendulum system is:
mgcos Nonlinear Equations
Using the givenntmention of Motion
MatlabSimulink simulation diagram to solve this mathematical mode
Simulate two sets of initial conditions shown in the next siles.
Submit the simulation diagrams and the plots of r vs and vs for
each set of initial conditions. Discuss your results, especially focusing
on any discrepancies between the predicted dynamic behavior and the
actual dynamic behavior
Actual Measured Dynamic Behavior
Actual Measured Dynamic Behavior
Do a Simulink program
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock