

Question: Please do 3.1 a and 3.2 3.1 Camera Matrix Computation a. Calculate the camera intrinsic matrix K, extrinsic matrix E, and full rank 44 projection
Please do 3.1 a and 3.2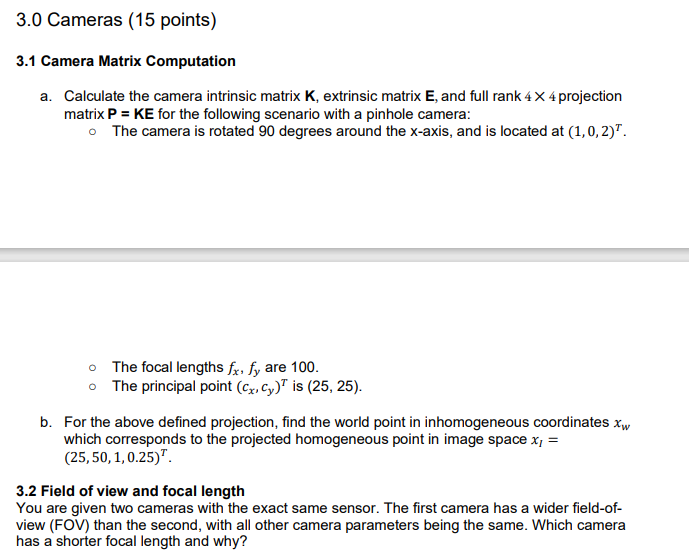
3.1 Camera Matrix Computation a. Calculate the camera intrinsic matrix K, extrinsic matrix E, and full rank 44 projection matrix P=KE for the following scenario with a pinhole camera: - The camera is rotated 90 degrees around the x-axis, and is located at (1,0,2)T. - The focal lengths fx,fy are 100 . - The principal point (cx,cy)T is (25,25). b. For the above defined projection, find the world point in inhomogeneous coordinates xw which corresponds to the projected homogeneous point in image space xI= (25,50,1,0.25)T. 3.2 Field of view and focal length You are given two cameras with the exact same sensor. The first camera has a wider field-ofview (FOV) than the second, with all other camera parameters being the same. Which camera has a shorter focal length and why
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts