

Question: Please help, and I will upvote you. From your textbook, Figure P8.13(a) shows a robot equipped to perform are welding. A similar device can be
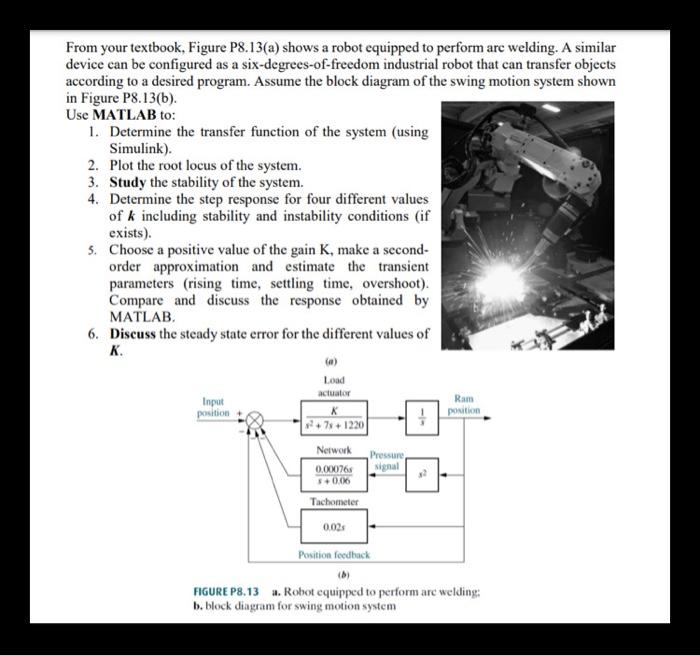
From your textbook, Figure P8.13(a) shows a robot equipped to perform are welding. A similar device can be configured as a six-degrees-of-freedom industrial robot that can transfer objects according to a desired program. Assume the block diagram of the swing motion system shown in Figure P8.13(b). Use MATLAB to: 1. Determine the transfer function of the system (using Simulink). 2. Plot the root locus of the system. 3. Study the stability of the system. 4. Determine the step response for four different values of k including stability and instability conditions (if exists). 5. Choose a positive value of the gain K, make a second- order approximation and estimate the transient parameters (rising time, settling time, overshoot). Compare and discuss the response obtained by MATLAB 6. Discuss the steady state error for the different values of K. Load actuator Input position Ram position +7+12201 Network 0.000765 Pressure signal Tachometer Position feedback b) FIGURE P8.13 a. Robot equipped to perform are welding: 1. block diagram for swing motion system
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts