

Question: please only legit answer i will like thanks = A process can be represented by the following transfer functions: 2 1 y*(s) -u* -d(s) 5s
please only legit answer i will like thanks
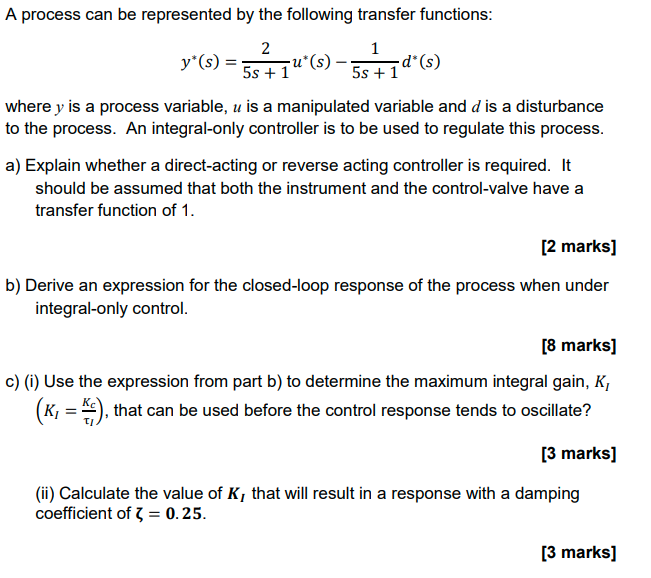
= A process can be represented by the following transfer functions: 2 1 y*(s) -u* -d(s) 5s +1 5s +1 where y is a process variable, u is a manipulated variable and d is a disturbance to the process. An integral-only controller is to be used to regulate this process. a) Explain whether a direct-acting or reverse acting controller is required. It should be assumed that both the instrument and the control-valve have a transfer function of 1. [2 marks] b) Derive an expression for the closed-loop response of the process when under integral-only control [8 marks] c) (i) Use the expression from part b) to determine the maximum integral gain, K, (K1 = "), that can be used before the control response tends to oscillate? = [3 marks] (ii) Calculate the value of K, that will result in a response with a damping coefficient of Y = 0.25. [3 marks] = A process can be represented by the following transfer functions: 2 1 y*(s) -u* -d(s) 5s +1 5s +1 where y is a process variable, u is a manipulated variable and d is a disturbance to the process. An integral-only controller is to be used to regulate this process. a) Explain whether a direct-acting or reverse acting controller is required. It should be assumed that both the instrument and the control-valve have a transfer function of 1. [2 marks] b) Derive an expression for the closed-loop response of the process when under integral-only control [8 marks] c) (i) Use the expression from part b) to determine the maximum integral gain, K, (K1 = "), that can be used before the control response tends to oscillate? = [3 marks] (ii) Calculate the value of K, that will result in a response with a damping coefficient of Y = 0.25. [3 marks]
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts