

Question: Please provide work / rationale for each part to be eligible for full credit. Include your printed name and signed academic integrity statement at the
Please provide work rationale for each part to be eligible for full credit. Include your printed name and signed academic integrity statement at the top see specification above
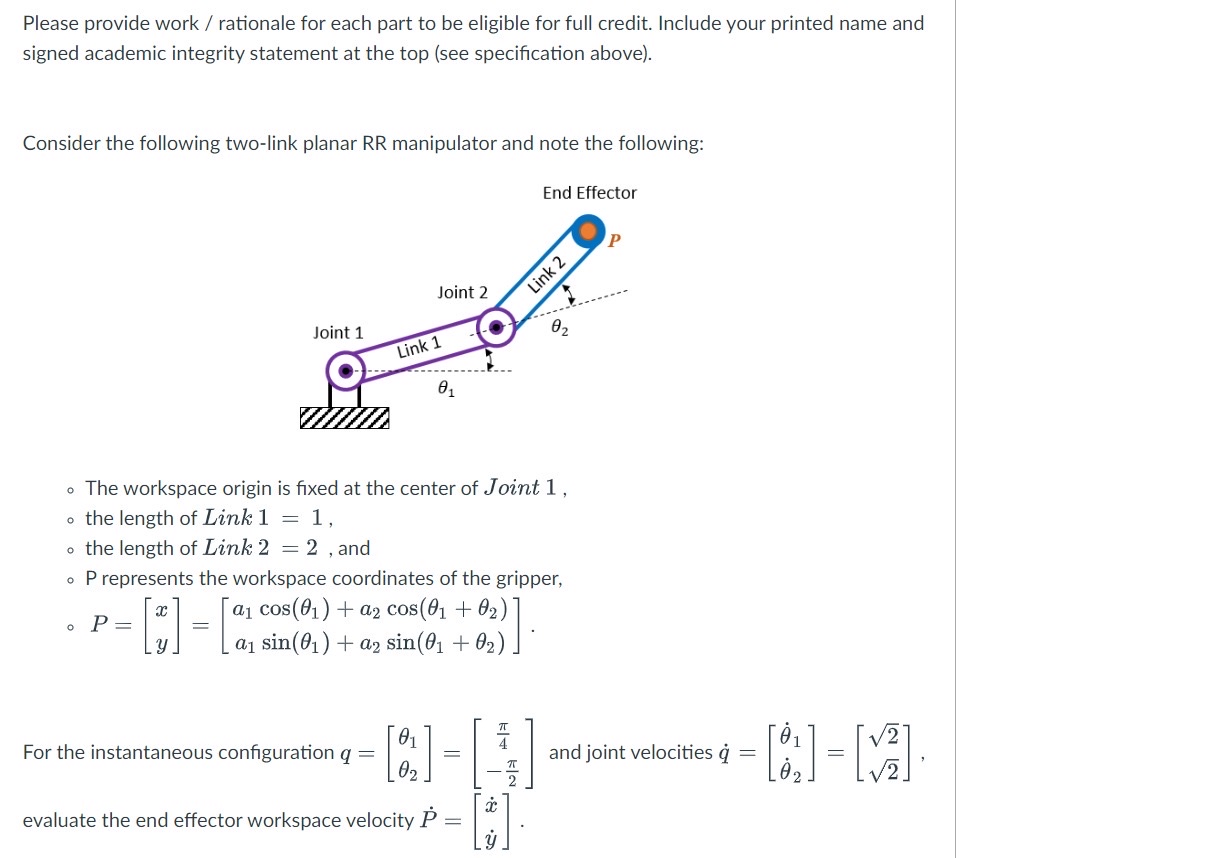
Consider the following twolink planar RR manipulator and note the following:
The workspace origin is fixed at the center of Joint
the length of Link
the length of Link and
Prepresents the workspace coordinates of the gripper,
For the instantaneous configuration and joint velocities evaluate the end effector workspace velocity
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock