

Question: please solve it all 3. Assume there is a differential-drive robot (find the parameters from the table according to your group ID) with two driving
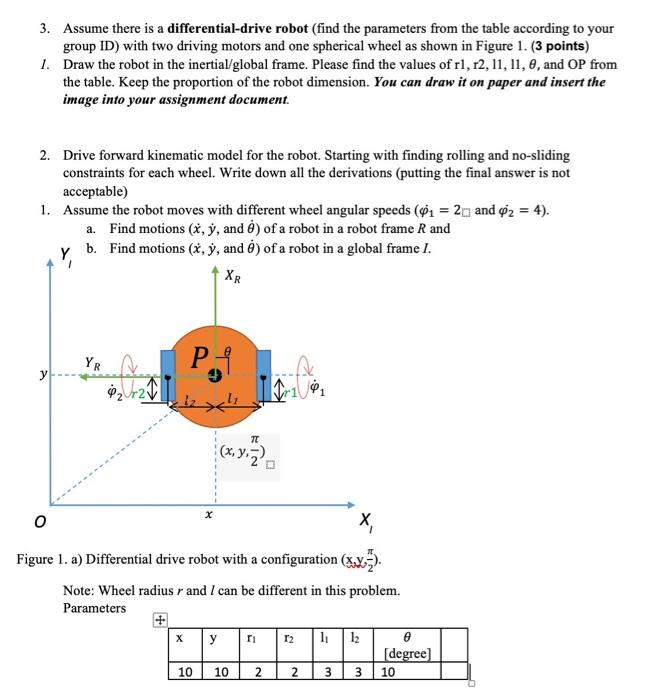
3. Assume there is a differential-drive robot (find the parameters from the table according to your group ID) with two driving motors and one spherical wheel as shown in Figure 1. (3 points) 1. Draw the robot in the inertial/global frame. Please find the values of r1,r2,11,11,, and OP from the table. Keep the proportion of the robot dimension. You can draw it on paper and insert the image into your assignment document. 2. Drive forward kinematic model for the robot. Starting with finding rolling and no-sliding constraints for each wheel. Write down all the derivations (putting the final answer is not acceptable) 1. Assume the robot moves with different wheel angular speeds (1=2 and 2=4). a. Find motions (x,y, and ) of a robot in a robot frame R and b. Find motions (x,y, and ) of a robot in a global frame I. Figure 1. a) Differential drive robot with a configuration (x,y,2). Note: Wheel radius r and l can be different in this problem. Parameters
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts