

Question: please use python An articulated robot arm is comprised of a series of links and joints. Write a program to implement a robotic arm, a
 please use python
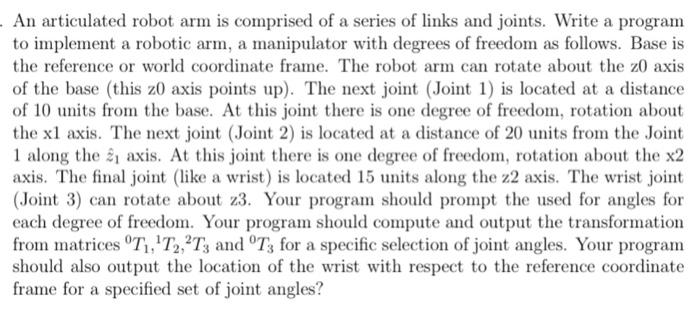
please use python An articulated robot arm is comprised of a series of links and joints. Write a program to implement a robotic arm, a manipulator with degrees of freedom as follows. Base is the reference or world coordinate frame. The robot arm can rotate about the z0 axis of the base (this z0 axis points up). The next joint (Joint 1 is located at a distance of 10 units from the base. At this joint there is one degree of freedom, rotation about the xl axis. The next joint (Joint 2) is located at a distance of 20 units from the Joint l along the axis. At this joint there is one degree of freedom, rotation about the x2 axis. The final joint (like a wrist) is located 15 units along the z2 axis. The wrist joint Joint 3) can rotate about z3. Your program should prompt the used for angles for each degree of freedom. Your program should compute and output the transformation from matrices T1, T2,2Ts and Ts for a specific selection of joint angles. Your program should also output the location of the wrist with respect to the reference coordinate frame for a specified set of joint angles
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts