

Question: Please write code for an obstacle avoiding robot that uses Arduino nano (with board extension), l298n motor driver, three ultrasonic sensors, and two IR sensors.
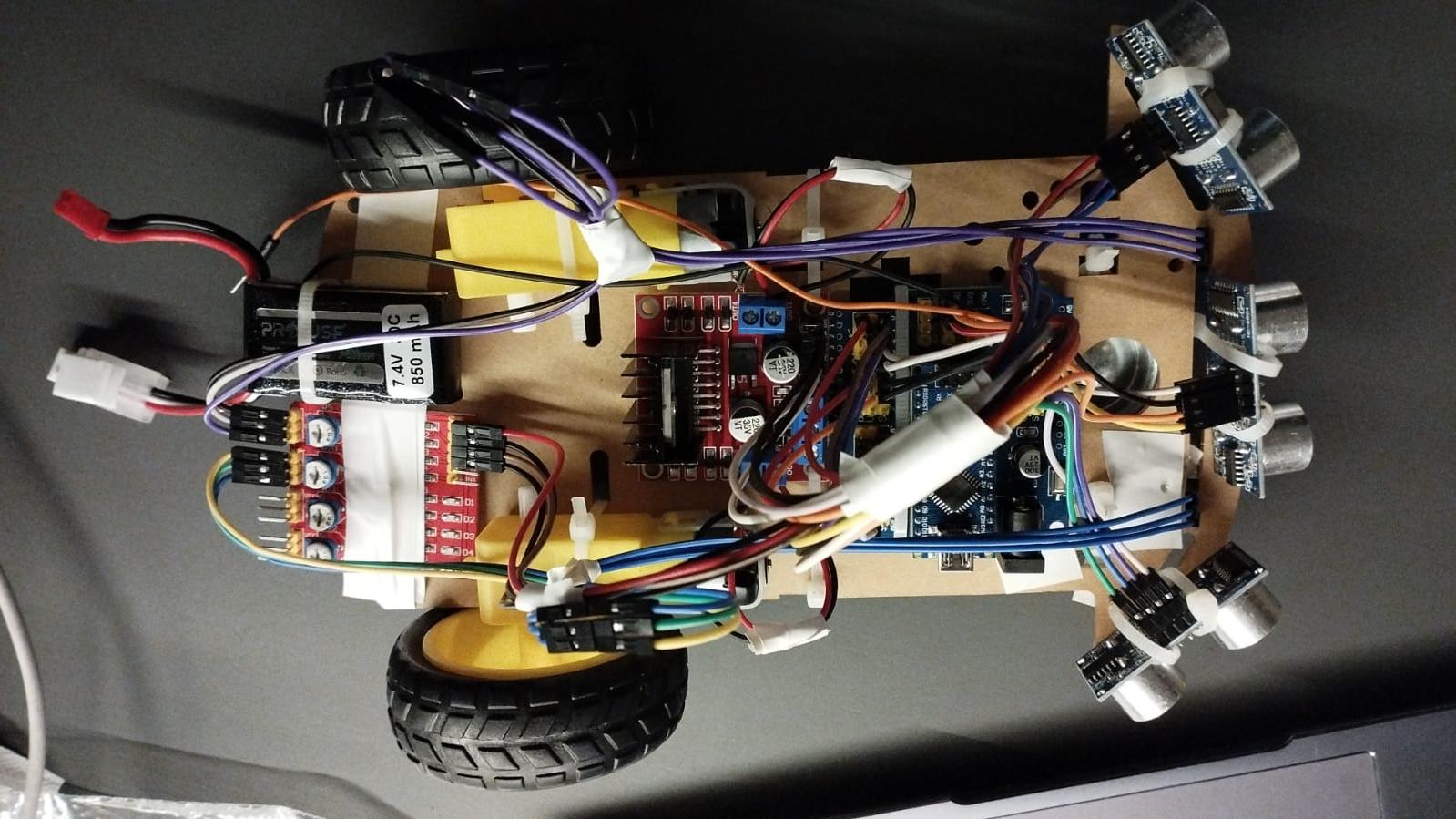
Please write code for an obstacle avoiding robot that uses Arduino nano (with board extension), l298n motor driver, three ultrasonic sensors, and two IR sensors. It doesn't have a servo motor, but has a 4 channel infrared sensor module. There are only 2 gear motors connected.
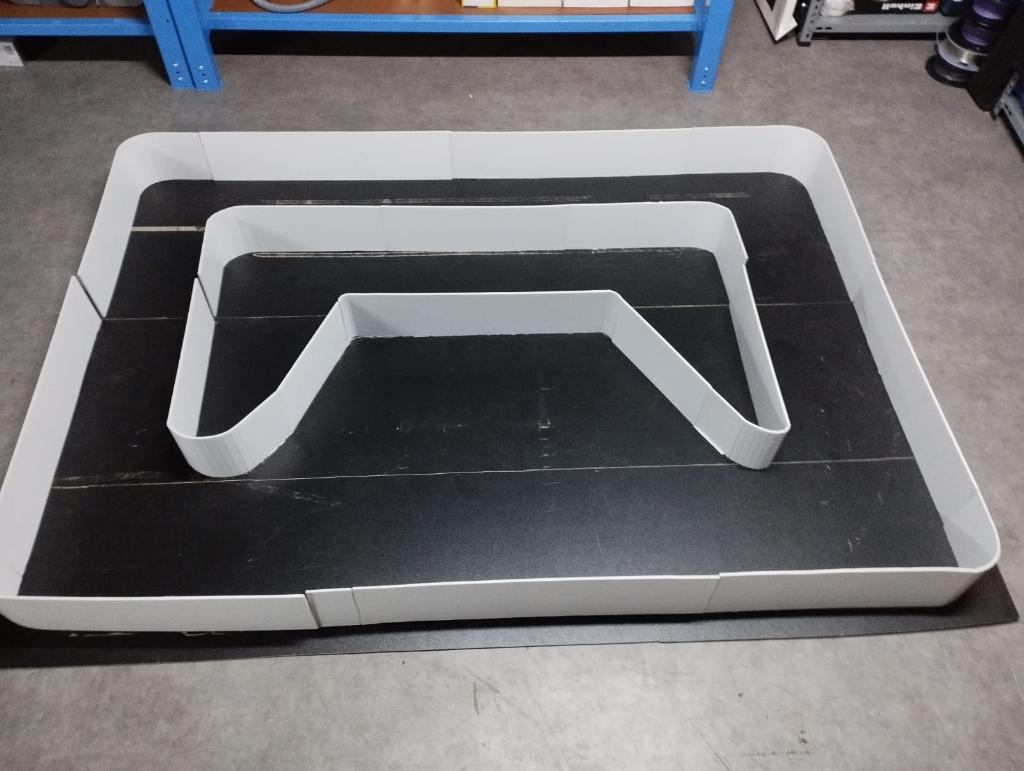
There will be a white horizontal line (tape) in the track as the starting point, it must wait 5 seconds before it moves, and once it finishes going around the track it needs to stop when it sees the same starting line again. That's why I am using the IR sensors. (I can fix the exact pin connections later). the track has a width of 30 cm, and the robot has a width of 15 cm.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock