

Question: Pretty please help me fix my MATLAB code, I've been struggling for quite some time. I hope I've included enough context information to help with
Pretty please help me fix my MATLAB code, I've been struggling for quite some time. I hope I've included enough context information to help with the MATLAB portion of the project.
Notes
utilize MATLAB function "ode to solve the system equations
Each plot should include curves
The first curve should show the pedal force Fp The second curve should show the CVT shift angle theta or theta.
Both curves should be plotted as a function of time. The simulation should start at time t and continue at least until the pedal force falls within of the desired FD the response time script that represents an accurate model of the automatic bicycle transmission
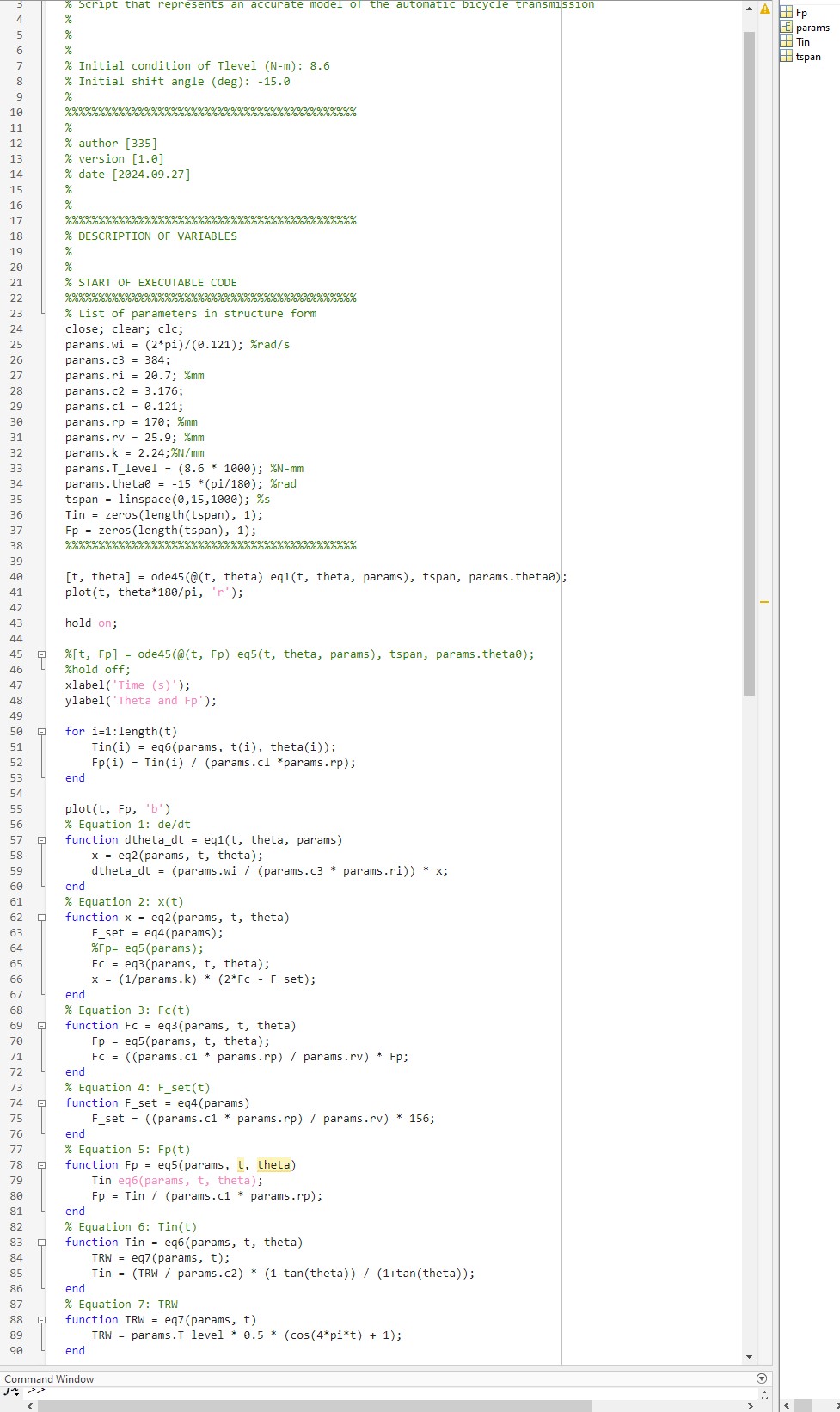
Initial shift angle deg:
author
version
date
DESCRIPTION OF VARIABLES
START OF EXECUTABLE CODE
List of parameters in structure form
close; clear; clc;
params.wi pi; rads
params.c;
params.ri ; mm
params.c;
params.c;
params.rp ; mm
params.rv ; mm
params.k ;Nmm
params.Tlevel ; Nmm
params.thetapi; rad
tspan linspace; s
Tin zeroslengthtspan;
Fp zeroslengthtspan;
t theta ode@t theta eqt theta, params tspan, params.theta;
plott thetapir;
hold on;
t Fp ode@t Fp eqt theta, params tspan, params.theta;
hold off;
xlabelTime s;
ylabelTheta and Fp;
for i:lengtht
Tini eqparams ti thetai;
Fpi Tini
params.cl paramsrp;
end
plott Fpb
Equation : dedt
function dthetadt eqt theta, params
x eqparams t theta;
dthetadt paramswi paramsc params.ri x;
end
Equation : xt
function x eqparamstmathrm theta
Fset eqparams;
Fp eqparams;
Fcmathrm eqparams t theta;
x paramskFc Fset;
end
Equation : Fct
function FC eqparams t theta
Fp eqparams t theta;
FC paramsc params.rp params.rv Fp;
end
Equation : Fsett
function Fset eqparams
Fset paramsc params.rp params.rv;
end
Equation : Fpt
function Fp eqparams t theta
Tin eqparams t theta;
Fp Tin paramsc params.rp;
end
Equation : Tint
function Tin eqparams t theta
TRN eqparams t;
Tin TRW params.ctanthetatantheta;
end
Equation : TRW
function TRW eqparams t
end
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock