

Question: Problem 1 (10 points): This question concerns the variables CHUTE_1_POSITION, CHUTE 2 POSITION and UpperBound (which equals PUT POSITION) in your Arduino sketch. The following
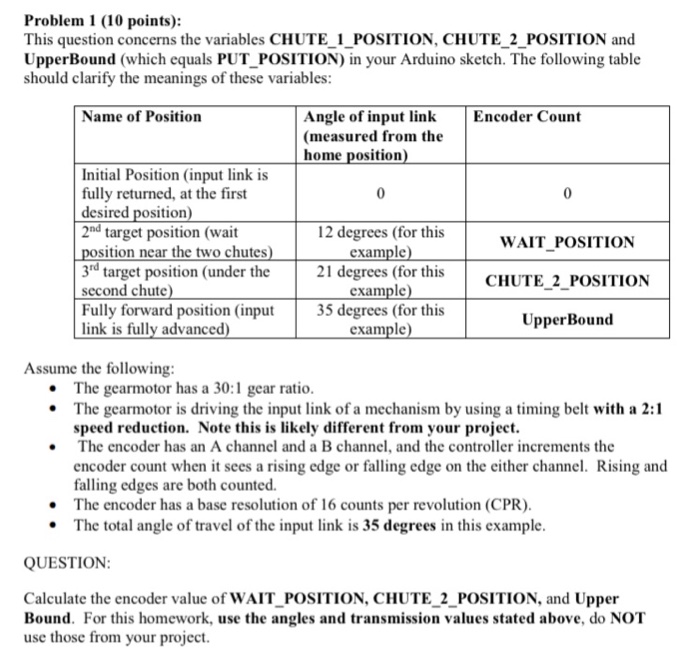
Problem 1 (10 points): This question concerns the variables CHUTE_1_POSITION, CHUTE 2 POSITION and UpperBound (which equals PUT POSITION) in your Arduino sketch. The following table should clarify the meanings of these variables Angle of input link Encoder Cou (measured from the home position) Name of Position Initial Position (input link is fully returned, at the first desired position) 2nd target position (wait 0 12 degrees (for this WAIT POSITION sition near the two chutes 3 target position (under the second chute Fully forward position inp35 degrees (for this link is fully advanced example example) example 21 degrees (for thisCHUTE 2 POSITION UpperBound Assume the following The gearmotor has a 30:1 gear ratio . The gearmotor is driving the input link of a mechanism by using a timing belt with a 2:1 . speed reduction. Note this is likely different from your project e The encoder has an A channel and a B channel, and the controller increments the encoder count when it sees a rising edge or falling edge on the either channel. Rising and falling edges are both counted. .The encoder has a base resolution of 16 counts per revolution (CPR) .The total angle of travel of the input link is 35 degrees in this example QUESTION Calculate the encoder value of WAIT POSITION, CHUTE 2 POSITION, and Upper Bound. For this homework, use the angles and transmission values stated above, do NOT use those from your project. Problem 1 (10 points): This question concerns the variables CHUTE_1_POSITION, CHUTE 2 POSITION and UpperBound (which equals PUT POSITION) in your Arduino sketch. The following table should clarify the meanings of these variables Angle of input link Encoder Cou (measured from the home position) Name of Position Initial Position (input link is fully returned, at the first desired position) 2nd target position (wait 0 12 degrees (for this WAIT POSITION sition near the two chutes 3 target position (under the second chute Fully forward position inp35 degrees (for this link is fully advanced example example) example 21 degrees (for thisCHUTE 2 POSITION UpperBound Assume the following The gearmotor has a 30:1 gear ratio . The gearmotor is driving the input link of a mechanism by using a timing belt with a 2:1 . speed reduction. Note this is likely different from your project e The encoder has an A channel and a B channel, and the controller increments the encoder count when it sees a rising edge or falling edge on the either channel. Rising and falling edges are both counted. .The encoder has a base resolution of 16 counts per revolution (CPR) .The total angle of travel of the input link is 35 degrees in this example QUESTION Calculate the encoder value of WAIT POSITION, CHUTE 2 POSITION, and Upper Bound. For this homework, use the angles and transmission values stated above, do NOT use those from your project
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts