

Question: Problem 1: In a sky-diving free-fall simulator, a large fan below the floor blows air upwards to suspend a sky-diver in the air flow. The
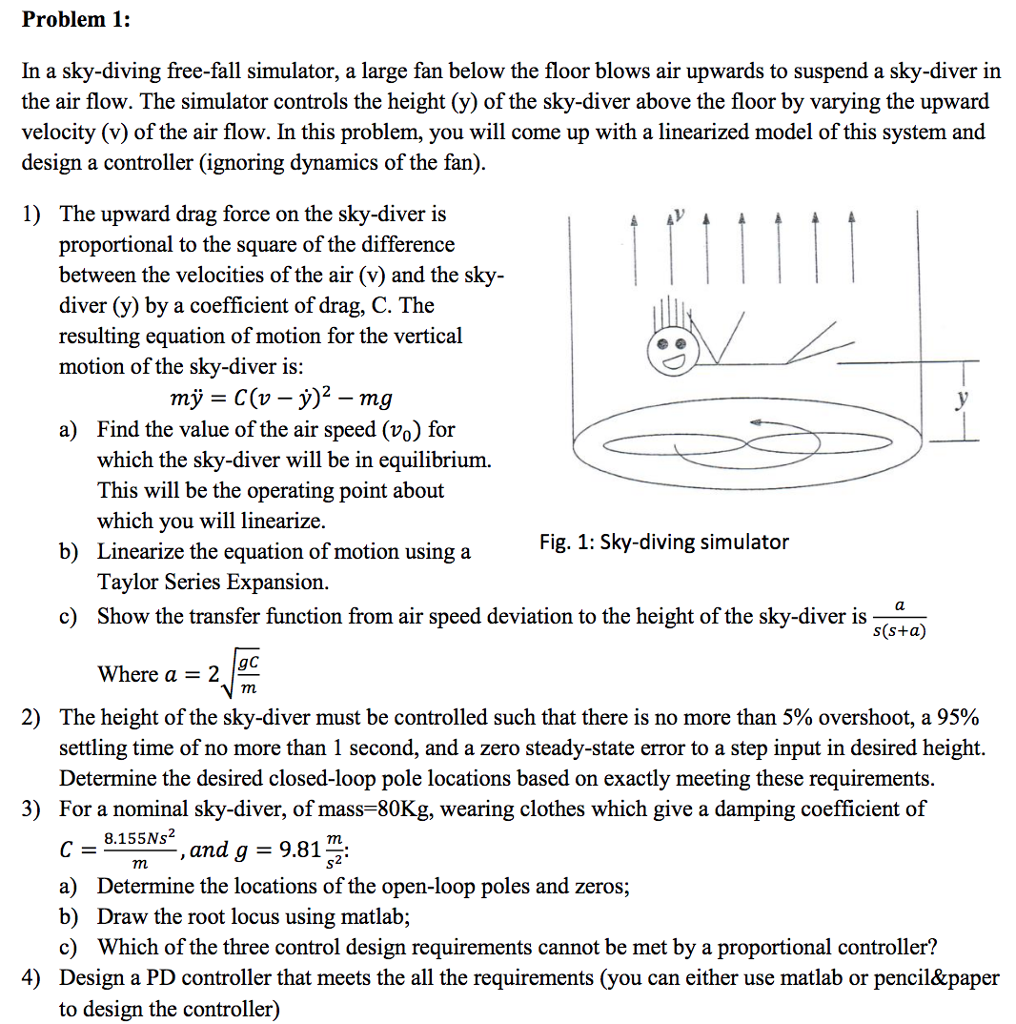
Problem 1: In a sky-diving free-fall simulator, a large fan below the floor blows air upwards to suspend a sky-diver in the air flow. The simulator controls the height (y) of the sky-diver above the floor by varying the upward velocity (v) of the air flow. In this problem, you will come up with a linearized model of this system and design a controller (ignoring dynamics of the fan) 1) The upward drag force on the sky-diver is proportional to the square of the difference between the velocities of the air (v) and the sky- diver (y) by a coefficient of drag, C. The resulting equation of motion for the vertical motion of the sky-diver is a) Find the value of the air speed (%) for which the sky-diver will be in equilibrium. This will be the operating point about which you will linearize. Linearize the equation of motion using a Taylor Series Expansion. Fig. 1: Sky-diving simulator b) c) Show the transfer function from air speed deviation to the height of the sky-diver is ---> s(s+a) gC Where a-2 2) The height of the sky-diver must be controlled such that there is no more than 5% overshoot, a 95% settling time of no more than 1 second, and a zero steady-state error to a step input in desired height. Determine the desired closed-loop pole locations based on exactly meeting these requirements For a nominal sky-diver, of mass-80Kg, wearing clothes which give a damping coefficient of 3) 8.155Ns2 andg9.8" a) b) c) Design a PD controller that meets the all the requirements (you can either use matlab or pencil&paper to design the controller) Determine the locations of the open-loop poles and zeros; Draw the root locus using matlab; Which of the three control design requirements cannot be met by a proportional controller? 4) Problem 1: In a sky-diving free-fall simulator, a large fan below the floor blows air upwards to suspend a sky-diver in the air flow. The simulator controls the height (y) of the sky-diver above the floor by varying the upward velocity (v) of the air flow. In this problem, you will come up with a linearized model of this system and design a controller (ignoring dynamics of the fan) 1) The upward drag force on the sky-diver is proportional to the square of the difference between the velocities of the air (v) and the sky- diver (y) by a coefficient of drag, C. The resulting equation of motion for the vertical motion of the sky-diver is a) Find the value of the air speed (%) for which the sky-diver will be in equilibrium. This will be the operating point about which you will linearize. Linearize the equation of motion using a Taylor Series Expansion. Fig. 1: Sky-diving simulator b) c) Show the transfer function from air speed deviation to the height of the sky-diver is ---> s(s+a) gC Where a-2 2) The height of the sky-diver must be controlled such that there is no more than 5% overshoot, a 95% settling time of no more than 1 second, and a zero steady-state error to a step input in desired height. Determine the desired closed-loop pole locations based on exactly meeting these requirements For a nominal sky-diver, of mass-80Kg, wearing clothes which give a damping coefficient of 3) 8.155Ns2 andg9.8" a) b) c) Design a PD controller that meets the all the requirements (you can either use matlab or pencil&paper to design the controller) Determine the locations of the open-loop poles and zeros; Draw the root locus using matlab; Which of the three control design requirements cannot be met by a proportional controller? 4)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts