

Question: Problem 1: Suppose you had a 5link robot arm like the one you see in Figure l, where the links are joined at points 0
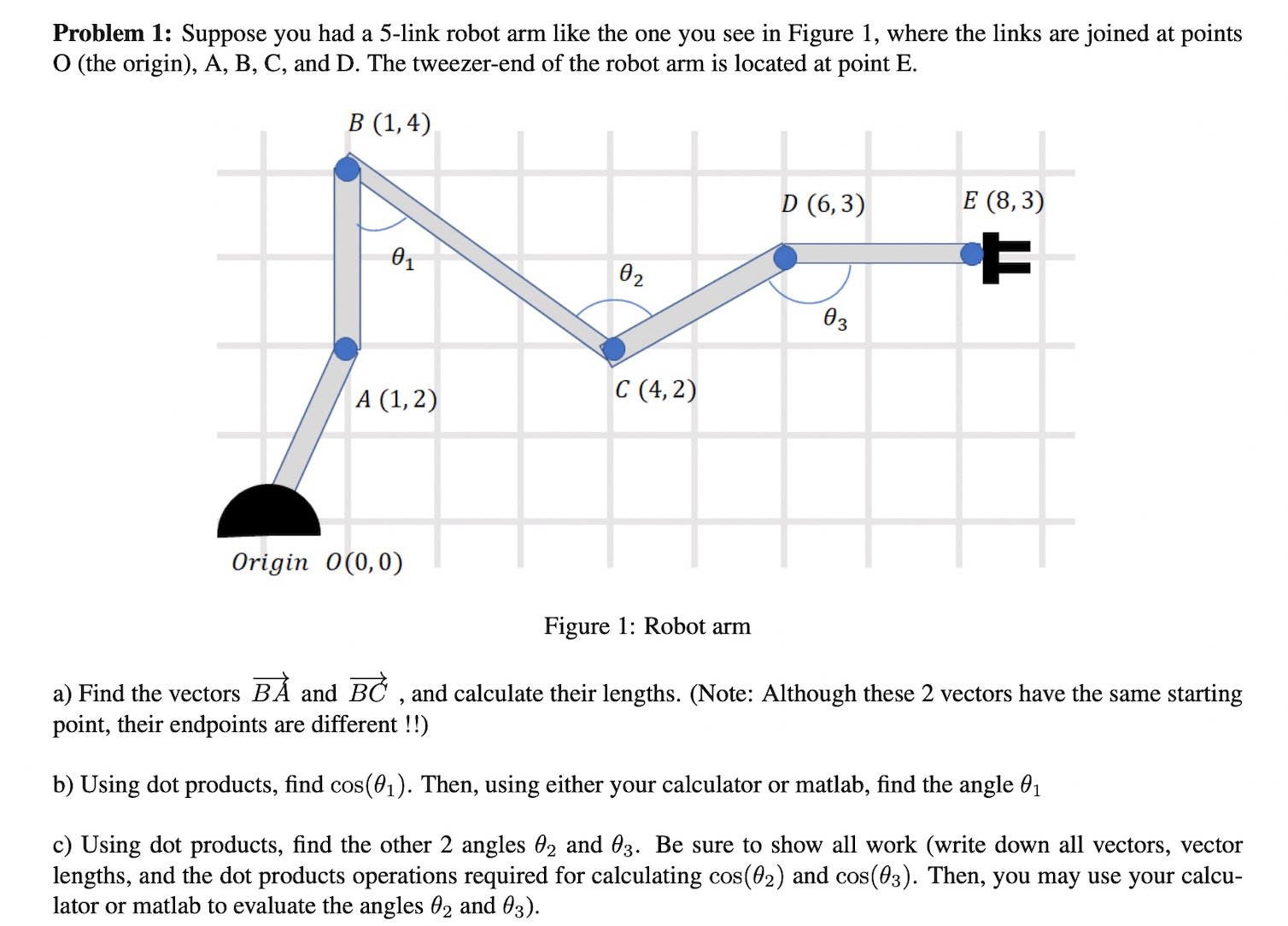
Problem 1: Suppose you had a 5link robot arm like the one you see in Figure l, where the links are joined at points 0 (the origin), A, B, C, and I). The tweezer-end of the robot arm is located at point E. B (1,4) Origin 0(0,0) Figure 1: Robot aim a) Find the vectors 5i and 36)" , and calculate their lengths. (Note: Although these 2 vectors have the same starting point, their endpoints are different I!) b) Using dot products, nd cos(61). Then, using either your calculator or matlab, nd the angle 91 c) Using dot products, nd the other 2 angles 62 and 63. Be sure to show all work (write down all vectors, vector lengths, and the dot products operations required for calculating cos(62) and cos(93). Then, you may use your calcu- lator or matlab to evaluate the angles 62 and 63)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts