

Question: Problem 2 : Fig. 2 shows a differential drive mobile robot having a pair of powered wheels and a frictionless caster. The radius of the
Problem :
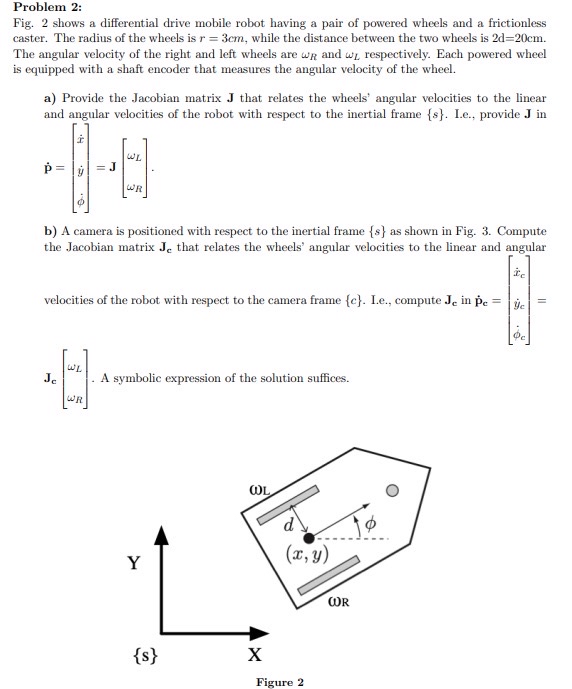
Fig. shows a differential drive mobile robot having a pair of powered wheels and a frictionless caster. The radius of the wheels is while the distance between the two wheels is The angular velocity of the right and left wheels are and respectively. Each powered wheel is equipped with a shaft encoder that measures the angular velocity of the wheel.
a Provide the Jacobian matrix that relates the wheels' angular velocities to the linear and angular velocities of the robot with respect to the inertial frame I.e provide in
b A camera is positioned with respect to the inertial frame as shown in Fig. Compute the Jacobian matrix that relates the wheels' angular velocities to the linear and angular velocities of the robot with respect to the camera frame I.e compute in A symbolic expression of the solution suffices.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock