

Question: Problem 3. (15%) The dynamics of a system is explained by the following transfer function. G(s) 15 s(s+12) You are asked to design a controller
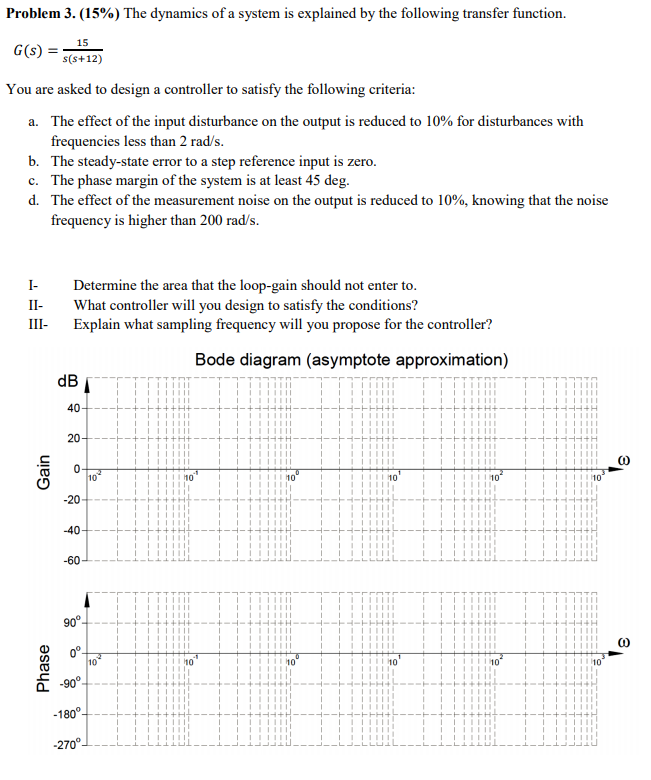
Problem 3. (15%) The dynamics of a system is explained by the following transfer function. G(s) 15 s(s+12) You are asked to design a controller to satisfy the following criteria: a. The effect of the input disturbance on the output is reduced to 10% for disturbances with frequencies less than 2 rad/s. b. The steady-state error to a step reference input is zero. c. The phase margin of the system is at least 45 deg. d. The effect of the measurement noise on the output is reduced to 10%, knowing that the noise frequency is higher than 200 rad/s. I- II- III- Determine the area that the loop-gain should not enter to. What controller will you design to satisfy the conditions? Explain what sampling frequency will you propose for the controller? Bode diagram (asymptote approximation) dB 40 20 Gain 0 10 110 10 10 -20 -40 -60 90 00 10 10 10 Phase -90 - 180 -270 Problem 3. (15%) The dynamics of a system is explained by the following transfer function. G(s) 15 s(s+12) You are asked to design a controller to satisfy the following criteria: a. The effect of the input disturbance on the output is reduced to 10% for disturbances with frequencies less than 2 rad/s. b. The steady-state error to a step reference input is zero. c. The phase margin of the system is at least 45 deg. d. The effect of the measurement noise on the output is reduced to 10%, knowing that the noise frequency is higher than 200 rad/s. I- II- III- Determine the area that the loop-gain should not enter to. What controller will you design to satisfy the conditions? Explain what sampling frequency will you propose for the controller? Bode diagram (asymptote approximation) dB 40 20 Gain 0 10 110 10 10 -20 -40 -60 90 00 10 10 10 Phase -90 - 180 -270
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts