

Question: Problem 3 ( 3 0 points ) Your satellite has a sensor that needs to be pointed at a target spacecraft. So you need the
Problem points
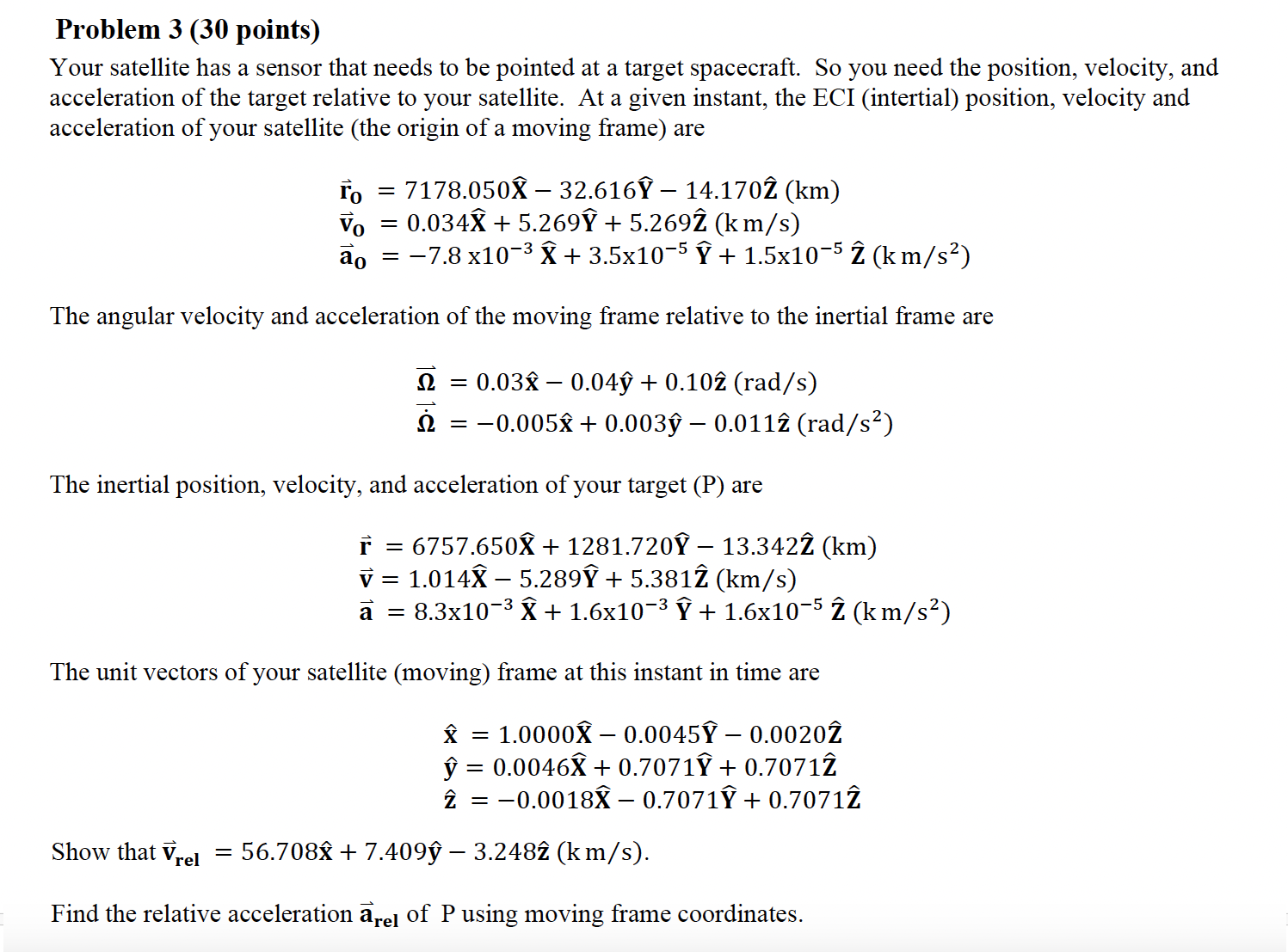
Your satellite has a sensor that needs to be pointed at a target spacecraft. So you need the position, velocity, and
acceleration of the target relative to your satellite. At a given instant, the ECI intertial position, velocity and
acceleration of your satellite the origin of a moving frame are
vecwidehatwidehatwidehat
vecwidehatwidehatwidehat
vecwidehatwidehatwidehat
The angular velocity and acceleration of the moving frame relative to the inertial frame are
vechathathat
vechathathat
The inertial position, velocity, and acceleration of your target are
widehatwidehatwidehat
widehatwidehatwidehat
vecwidehatwidehatwidehat
The unit vectors of your satellite moving frame at this instant in time are
widehatwidehatwidehatwidehat
hatwidehatwidehatwidehat
hatwidehatwidehatwidehat
Show that vechathathat
Find the relative acceleration vec of P using moving frame coordinates.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock